Welcome to LEGO Wireless Protocol 3.0.00 documentation!¶
1. Introduction¶
The LEGO Bluetooth 3.X Hub Profile consists of a single Bluetooth LE GATT service. The service allows users to read info about the LEGO Hub (name, battery level, etc.) and to interact with any sensors and motors connected to it.
For more details on Bluetooth LE GATT, visit <https://www.bluetooth.org>.
1.1. Versions¶
Bluetooth Hub Profile (this document): XX
Implemented in LEGO Hub Firmware: XX
Implemented in LEGO Hub SDK: XX
1.2. Glossary¶
| Term | Description |
|---|---|
| Brake | When the motor is shorted through the motordriver. |
| Central | A LEGO BLE H/W only Network will always have 1 Central and a number of Peripherals. If a Smart Device (e.g. an iPad) is used, this will always have the Central role. |
| Client | NOT USED! No real client/server connection. |
| Coast | Another word for a free running motor (float) |
| Combined Mode | Indicates whether the Modes of a given Port can be used as a group to get mutliple values at once |
| CombinedSensor | A sensor able to have more Mode/Dataset combinations. e.g. the LPF2 Vision Sensor |
| Dataset | Dataset represents a portion of sensor output in a given mode. e.g. RGB sensor has 3 Datasets - one each for RGB |
| Device | NOT USED! Ambiguous meaning |
| Drift | Another word for a free running motor (float) |
| Drive | Another word for 2 syncronized/regulated motors |
| Drive Base | An intelligent Brick with 2 built in synchronized motors |
| Float | Another word for an inactive port. I.e. NO power power supplied to a motor (high impedance). |
| Hold | When the motor is stopped (no rotation/movement), but the driver continues to keep the current position by actively |
| Hub | A LEGO Bluetooth LE compatible Hub |
| LPF2 Device | Physical or Virtual sensor/actuator connected to a Hub |
| Master | NOT USED! Can be mixed up with the Central/ Peripheral role, so NOT used. Misused even in some H/W datasheets |
| Max-Power | Max-Power describes the upper power limit for speed commands. Max-Power sets the maximum power that the regulation is allowed to use while trying to maintain a certain speed. |
| Mode | A Mode is a Port feature, allowing the Port to operate in different ways. |
| Peripheral | LEGO hub connected to a Central Role hub or Smart Device |
| Power | Is the word used when applying power to an output port (e.g. a motor). Power is different from Speed, in that it is unregulated, and thereby only sets the PWM Duty Cycle for the output. All LPF2 motors and hubs support power commands. |
| Server | NOT USED! No real client/server connection. |
| Slave | NOT USED! Can be mixed up with the Central/ Peripheral role, so NOT used.Misused even in some H/W datasheets. |
| Speed | Is the word used when applying speed to an output (normally a tacho-motor). Speed is regulated, which means that the hub will control the power to the motor and hence it can maintain a given speed. |
| Steering | Another word for regulated/synchronized motors. |
| Synchronization | The act of joining two Ports into a Virtual Port. e.g. The 2 internal motors of a drivebase. |
| Virtual Port | Port resulting from synchronizing two Ports |
| Virtual Sensor | A sensor delivering the (logical) average of two sensor. e.g A virtual sensor representing the average tacho counts from 2 synchronized motors (acting as a drivebase). |
2. Advertising¶
When in Advertising mode, a LEGO BLE compatible device fills in the message with its friendly name (as described in Properties) along with up to n sequential bytes of Manufacturer Data.
The Manufacturer Data is filled in according to the table below:
Manufacturer Data Name Description Offset Format Min Max Length Length of data 0 UINT8 0x09 0x09 Data Type Name Manufacturer specific data to follow 1 UINT8 0xFF 0xFF Manufacturer ID Manufacturer identifier 2 UINT16 0x0397 0x0397 Button State Reflects the state of the device button 4 UINT8 0 1 System Type and Device Number Identifies the system type of the Hub 5 UINT8 0x00 0xFF Device Capabilities Describes the capabilities of the device 6 UINT8 0x01 0xFF Last network Network ID of the last network 7 UINT8 0 255 Status Actual status 8 UINT8 0 255 Option Future use 9 UINT8 0 255
2.1. System Type and Device Number¶
Encoded as 2 bit-fields in one byte SSS DDDDD
The System Type contained in the leftmost bits is interpreted as:
SSSDescription 000 LEGO Wedo 2.0 001 LEGO Duplo 010 LEGO System 011 LEGO System
The Device Number in the rightmost bits represents the unique identifier for a product within a System Type. The currently available LEGO BLE compatible devices are:
SSSDDDDDDescription 000 00000 WeDo Hub 001 00000 Duplo Train 010 00000 Boost Hub 010 00001 2 Port Hub 010 00010 2 Port Handset
2.2. Device Capabilities (Hub Kind)¶
Encoded as a bit-field CCCC CCCC
A LEGO BLE compatible device has capabilities, but not all devices have the same capabilities.
CCCC CCCCDescription 0000 0001 Supports Central Role 0000 0010 Supports Peripheral Role 0000 0100 Supports LPF2 devices (H/W connectors) 0000 1000 Act as a Remote Controller (R/C) 0001 0000 TBD 0010 0000 TBD 0100 0000 TBD 1000 0000 TBD
2.3. Last Network ID¶
The Last Network ID is used in the LEGO BLE device pairing process.
000: NONE (unknown) 001..250: The ID’s used for “Last Connection” Network ID’s. Used in H/W network “auto connect” 251: DEFAULT 1, Locked 252: DEFAULT 2, NOT Locked 253: DEFAULT 3, RSSI Dependent 254: DEFAULT 4, DISABLE H/W Network 255: DON’T CARE - NOT Implemented
2.4. Status¶
Encoded as a bit-field SSSS SSSS
SSSS SSSS |
Description |
|---|---|
| 0000 0001 | “I can be Peripheral” |
| 0000 0010 | “I can be Central” |
| 0000 0100 | TBD |
| 0000 1000 | TBD |
| 0001 0000 | TBD |
| 0010 0000 | “Request Window” A stretching of the Button Pressed (Adding 1 sec. after release) [part of connection process]. See Request Window |
| 0100 0000 | “Request Connect”. Hardcoded request (i.e. CONSTANT flag) |
| 1000 0000 | TBD |
2.4.1. Request Window¶
The “Connect from poweron” will be delayed, as long as the user hold down the connection button. On the central, the button pressed from powerup is also used for detecting “Go into bootloader mode” or “The clear last connection table”. This is why the connection request on the central is measured/sampled from the button release. The pulse-stretching bit will be held set for 1000 mS. after the release of the Connection Button. For more information about userinterface see the LPF2 Platforms document.
2.5. Future Option Byte(s)¶
000..255: TBD
3. LEGO Specific GATT Service¶
The LEGO Bluetooth 3.X Hub Profile contains the following service:
| Service | UUID |
|---|---|
| LEGO Hub Service | 00001623 -1212-EFDE-1623-785FEABCD123 |
Due to potential limitations in future BLE chipsets, the LEGO Service only contains one single characteristic:
| Characteristic | UUID |
|---|---|
| LEGO Hub Characteristic | 00001624 -1212-EFDE-1623-785FEABCD123 |
| The <1624> LEGO Hub Characteristic Supported Properties | |
|---|---|
| Property | Description |
| Write without response [1] | Allows users to use the Write Command ATT operation on this characteristic. |
| Notify | Allows the user to use the Handle Value Notification ATT operation on this characteristic. |
[1]See Transmission Flow Control (Preliminary PROPOSAL!) - UNTIL IMPLEMENTED, the write will be Write With Response (Apple IOS stuff).
Note, that throughout the remainder of this documentation, these UUIDs will be referenced by their short form (the part marked in bold).
Thus, since all attributes and properties are accessed through a single characteristic, the notion of updates is introduced to clearly distinguish these from standard characteristic notifications. Furthermore, with only a single characteristic available, communicating with the Hub as of Hub Profile 3.X and onwards is not done the usual way, when it comes to the use of services and characteristics. Normally, each attribute/property has its own characteristic, but with the limitation of only a single characteristic, these attributes/properties are now identified through a Message Type field included in a Common Header described below:
3.1. Common Message Header¶
| LEGO Hub Characteristic (UUID: 1624) - Common Header | |
|---|---|
Communication: Size: Description: Length: Hub ID: |
Downstream + Upstream 3 Bytes Common Header for all messages in the LEGO Hub Characteristic. Introduced to be independent of the MTU in the transport layer. Handle to a Hub node in a H/W network - stand-alone networks without a Smart Device. Header format - see below. |
| Header Format: | ||||
|---|---|---|---|---|
| Name: | Description: | Format: | Min: | Max: |
| Length | Length of entire message in bytes (escaped and 2 bytes for long messages) For further information about encoding - see Message Length Encoding | Uint8 (Uint7) /Uint16 | N/A | N/A |
Hub ID NOT USE at the moment! Always set to 0x00 (zero) |
Hub identifier is needed when a Hub is connected as a bridge to a network formerly build without a SMART DEVICE. E.g. HUB A is connected to HUB B and HUB C is added. After a while the SMART DEVICE is connected to the network. HUB A is now acting as a Central for B and C while acting as a Peripheral to the SMART DEVICE. Data from B and C will be routed through HUB A. | Uint8 | 0 | 255 |
| Message Type | Identifies the kind of message transmitted. For message types - see Message Types | Uint8 | 0 | 0xXX |
3.2. Message Length Encoding¶
Messages having a length of 1 to 127 bytes is represented in 1 byte. For messages above 127, the 1 byte encoding is escaped and 2 bytes is used - i.e. if bit 7 in the very first byte is set, the following byte (2’nd) should also be used for en-/decoding the length. Hence the LSB (1st byte) can only be used as 7 bit. Lengths greater than 127 are therefore represented as:
| Message Length Encoding | |
|---|---|
| LSB: | MSB: |
| 1000 0000 | 0000 0001 = 128 |
| 1000 0001 | 0000 0001 = 129 |
| 1000 0010 | 0000 0001 = 130 |
3.3. Message Types¶
The table below summarizes the various Message Types introduced. These will be described in detail in the following sections.
| Message Type Definitions - HUB related | ||||
|---|---|---|---|---|
| Message Type definitions available for the LEGO Hub Characteristic (0x1624) | ||||
| Name | Value | Comm. | Reply to | Notes |
| Hub Properties | 0x01 | Down + Up | 0x01 | Set or retrieve standard Hub Property information |
| Hub Actions | 0x02 | Down + Up | 0x02 | Perform actions on connected hub |
| Hub Alerts | 0x03 | Down + Up | 0x03 | Subscribe or retrieve Hub alerts |
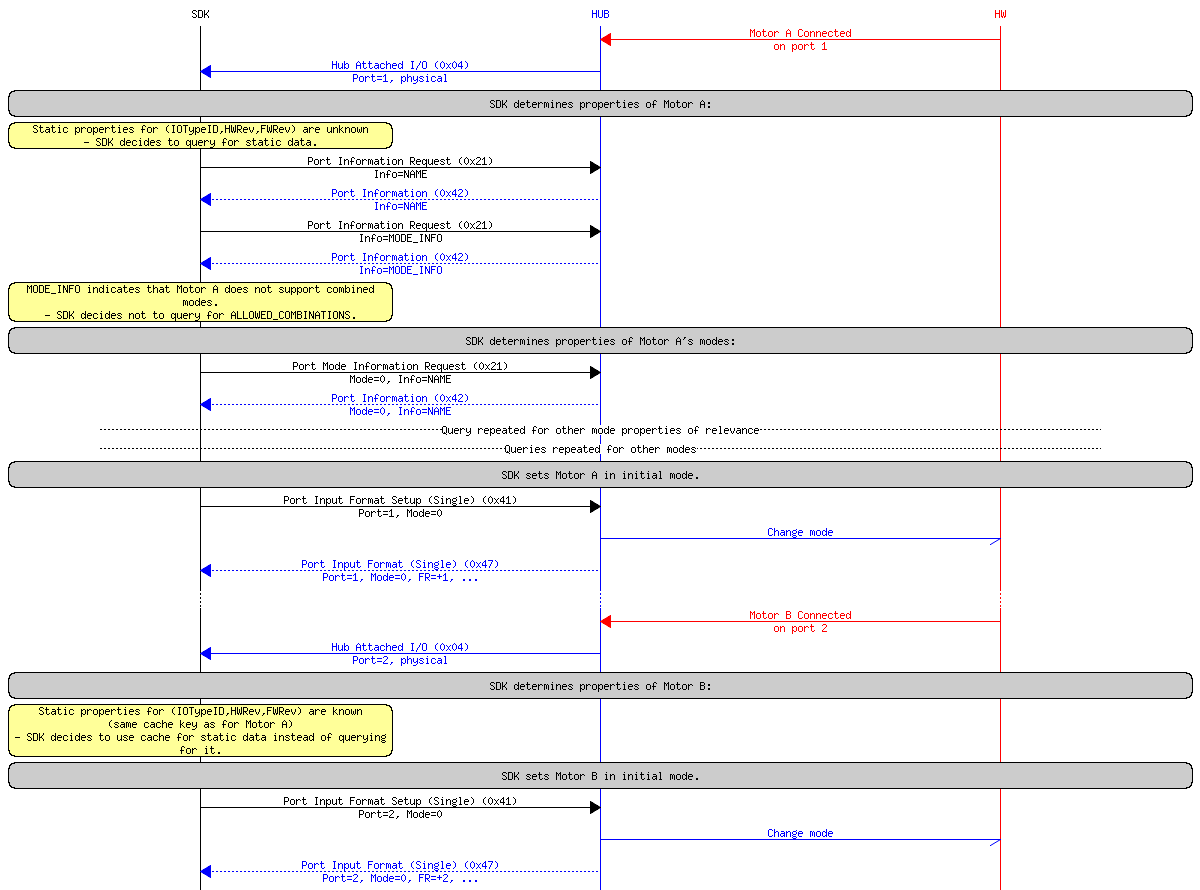
| Hub Attached I/O | 0x04 | Up | N/A | Transmitted upon Hub detection of attached I/O |
| Generic Error Messages | 0x05 | Up | N/A | Generic Error Messages from the Hub |
| H/W NetWork Commands | 0x08 | Down + Up | 0x08 | Commands used for H/W Networks |
| F/W Update - Go Into Boot Mode | 0x10 | Down | N/A | Set the Hub in a special Boot Loader mode |
| F/W Update Lock memory | 0x11 | Down | N/A | Locks the memory |
| F/W Update Lock Status Request | 0x12 | Down | N/A | Request the Memory Locking State |
| F/W Lock Status | 0x13 | Up | 0x12 | Answer to the F/W Lock Status Request |
| Message Type Definitions - PORT(s) related | ||||
|---|---|---|---|---|
| Message Type definitions available for the LEGO Hub Characteristic (0x1624) | ||||
| Name | Value | Comm. | Reply to | Notes |
| Port Information Request | 0x21 | Down | N/A | Request Port information |
| Port Mode Information Request | 0x22 | Down | N/A | Request Port Mode information |
| Port Input Format Setup (Single) | 0x41 | Down | N/A | Setup input format for single mode |
| Port Input Format Setup (CombinedMode) | 0x42 | Down | Setup input format for multiple modes (CombinedMode) | |
| Port Information | 0x43 | Up | 0x21 | N/A |
| Port Mode Information | 0x44 | Up | 0x22 | N/A |
| Port Value (Single) | 0x45 | Up | 0x21 | Value update related to single Port Mode |
| Port Value (CombinedMode) | 0x46 | Up | 0x21 | Value update related to multiple Port Modes in combination (CombinedMode) |
| Port Input Format (Single) | 0x47 | Up | 0x41 | N/A |
| Port Input Format (CombinedMode) | 0x48 | Up | 0x42 | N/A |
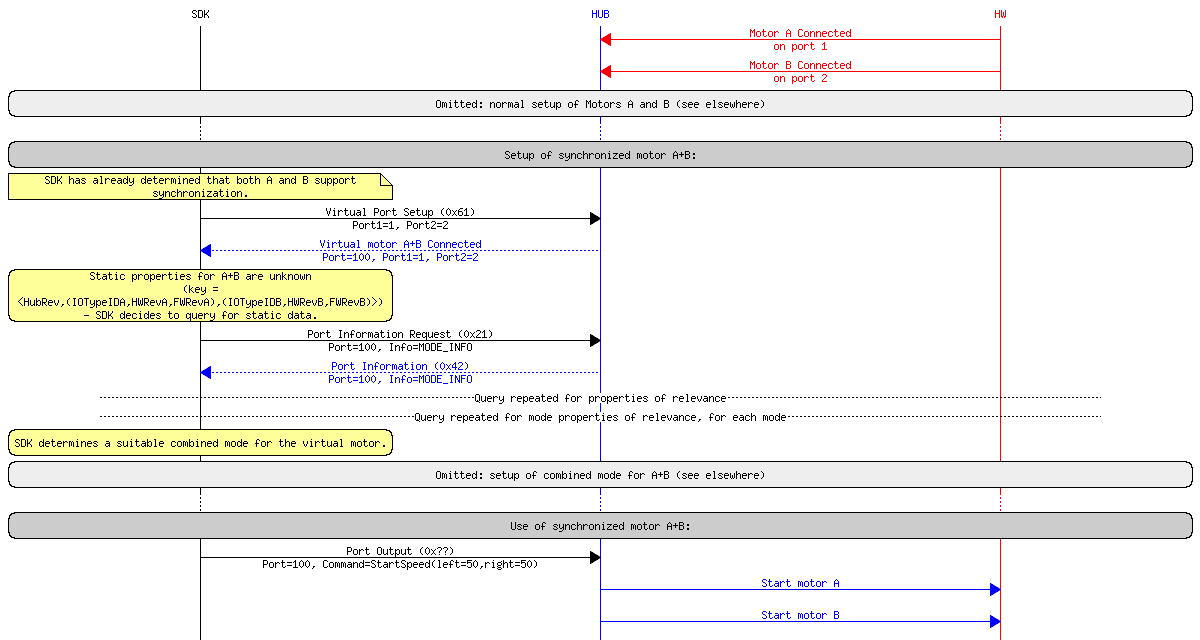
| Virtual Port Setup | 0x61 | Down | N/A | Used to control synchronization between synchronizable ports. |
| Port Output Command | 0x81 | Down | N/A | Used to execute Port Output commands |
| Port Output Command Feedback | 0x82 | Up | 0x81 | Provides feedback on completed Port Output commands |
3.4. Transmission Flow Control (Preliminary PROPOSAL!)¶
Warning
In order to allow a safe and lossless transmission over Bluetooth Low Energy (IOS) we have to add some delivery check. We still want fast response for small control messages. Using a sequence number will let us known if messages are missing, but having the same knowledge at both sender and receiver will slow down the overall throughput. Using a prioritized ack-/nack protocol could be a compromise. The priority counter could be as simple as only 1 bit.
Sequence and priority counter: PPPS SSSS - P = Priority counter bits (0-7) S = Sequence counter (0-31-0)
| Sender: | Receiver: | Ack/Nack counter: | |
| 010 | 00001 | 01000001 | 01000001 |
| 001 | 00010 | 00100010 | 00100010 |
| 000 | 00011 | 00000011 | 000 => Send ACK 00011 |
| 000 | 11000 | 00011000 | 000 => Send ACK 11000 // FAST |
| 011 | 11011 | 01111011 | 01111011 |
| 010 | 11100 | 01011100 | 01011100 |
| 001 | 11101 | ??????? | 01011100 // Still |
| 000 | 11110 | 00011110 | 01011100 => Send NACK 11100 |
3.5. Hub Properties¶
| Message Type - Hub Properties [0x01] | |
|---|---|
Communication: Size: Description: |
Downstream + Upstream 5 Bytes + Payload This message allows access and control of the various different properties of the Hub. The message introduces the notion of Updates. This term coins the various different data which the Hub is capable of delivering. Note, that all the data updates are controlled by the Notify property of the LEGO Hub Characteristic. If notifications are disabled, not a single update will be delivered. Since not all operations apply for all properties of the hub, the following table seeks to identify valid combinations as well as indicating which data is part of the downstream message, and vice versa. |
3.5.1. Hub Property and Operation¶
| Property | Operation | |||||
|---|---|---|---|---|---|---|
| Set | Enable Update | Disable Update | Reset | Req. Update | Update | |
| Adv. Name | X | X | X | X[2] | X | X |
| Button | X | X | X | X | ||
| FW Version | X | X | ||||
| HW Version | X | X | ||||
| RSSI | X | X | X | X | ||
| Battery Voltage | X | X | X | X | ||
| Battery Type | X | X | ||||
| Manufacturer Name | X | X | ||||
| Radio Firmware Version | X | X | ||||
| LWP [3] Protocol Version | X | X | ||||
| System Type ID | X | X | ||||
| H/W NetWork ID x | X | X | X | X | ||
| Primary MAC address | X | X | ||||
| Secondary MAC address | X | X | ||||
| H/W Network Family | X | X | X | |||
[2] Resetting the Adv. Name will automatically insert the DEFAULT NAME
[3] LWP = LEGO Wireless Protocol
3.5.2. Hub Property Message Format¶
| Message Format | ||||||
|---|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | ||
| Common Header | See Common Message Header for header format | N/A | N/A | N/A | ||
| Property | Identifies the Hub Property Operation subject to the performed operation: | Uint8 | 0x01 | 0x0F | ||
| Operation | Identifies the type of Hub Property Operation performed: | Uint8 | 0x01 | 0x06 | ||
| Payload | The Hub Property Payload. Note, Common Header Length field governs the length of the payload. | Uint8[?] | N/A | N/A | ||
3.5.3. Hub Property Reference¶
| Property Reference [UInt8] | Property Name |
|---|---|
| 0x01 | Advertising Name |
| 0x02 | Button |
| 0x03 | FW Version |
| 0x04 | HW Version |
| 0x05 | RSSI |
| 0x06 | Battery Voltage |
| 0x07 | Battery Type |
| 0x08 | Manufacturer Name |
| 0x09 | Radio Firmware Version |
| 0x0A | LEGO Wireless Protocol Version |
| 0x0B | System Type ID |
| 0x0C | H/W Network ID |
| 0x0D | Primary MAC Address |
| 0x0E | Secondary MAC Address |
| 0x0F | Hardware Network Family |
3.5.4. Hub Property Operation¶
| Property Operation | |
|---|---|
| 0x01 | Set (Downstream) |
| 0x02 | Enable Updates (Downstream) |
| 0x03 | Disable Updates (Downstream) |
| 0x04 | Reset (Downstream) |
| 0x05 | Request Update (Downstream) |
| 0x06 | Update (Upstream) |
3.5.5. Hub Property Payload¶
| Property Payload | |||||
|---|---|---|---|---|---|
| Property ref: | Direction Up-/Downstream: | Description | Format | Min | Max |
| 0x01 | Upstream/Downstream | Advertising Name[A] | UInt8[MAX_NAME_SIZE] | 1 char | MAX_NAME_SIZE [B] |
| 0x02 | Upstream | Button State TRUE/FALSE [0x01/0x00] | UInt8 | 0x00 | 0x01 |
| 0x03 | Upstream | FW Version encodes as: Version Number Encoding | Int32[C] | N/A | N/A |
| 0x04 | Upstream | HW Version encodes as: Version Number Encoding | Int32[C] | N/A | N/A |
| 0x05 | Upstream | RSSI[D] | Int8 | -127 | 0 |
| 0x06 | Upstream | Battery Voltage [%] | UInt8 | 0x00 | 0x64 |
| 0x07 | Upstream | Battery Type: [Normal/Rechargable] | UInt8 | 0x00 Normal Battery type | 0x01 Rechargeable block |
| 0x08 | Upstream | Manufacturer Name LEGO System A/S | Uint8[] “LEGO System A/S” | UInt8[15] | UInt8[15] |
| 0x09 | Upstream | Radio Firmware Version as a string. E.g. “7.1e” | Uint8[] | UInt8[15] | UInt8[15] |
| 0x0A | Upstream | LWP Protocol Version Encoded as LWP Version Number Encoding | UInt16 | 0x0100 | 0x9999 |
| 0x0B | Upstream | System Type ID[E] See System Type and Device Number for info. | UInt8 | N/A | N/A |
| 0x0C | Upstream | H/W NetWork ID[F] See Last Network ID for info. | UInt8 | 0x01 | 0xFA (250) |
| 0x0D | Upstream | Primary MAC address[G] This is the MAC address used when the normal application runs on the BLE device. | 6 Bytes | N/A | N/A |
| 0x0E | Upstream | Secondary MAC address[G] The MAC address used for the Boot Loader task. | N/A | N/A | |
| 0x0F | Upstream | H/W Network Family [0-8]. Used in conjunction with H/W Net- work ID to configure H/W stand- alone networks. E.g. In an education setup. | UInt8 | 0x00 | 0x08 |
[A] This is also the name which is placed in the Advertising Response packet.
[B] MAX_NAME_SIZE = 14 Chars (Packet limitations)
[C] Sint32 is a leftover from earlier version numbering schemes.
[D] RSSI (Received Signal Strength Indicator) is the RF-level measured at receiving device. This level depends of distance, transmitted power and obstacles in the “line of sight”. Not a “real” calibrated dBm, but a less negative number still equals a higher and better signal level.
[E] System Type ID is also advertised by both the normal application and the Boot Loader. Used when the HUB or other BLE device doesn’t have an image - i.e. this property can’t be accessed. See System Type and Device Number for encoding.
[F] When unconnected this is the number transmitted as Last Network in the Advertising Packet.
[G] Some operating systems uses the MAC address for persistent reference and hence different Services can not be interleaved randomly. By using a different MAC address as well as a different UUID for the services, these operating systems will see two different services while advertising goes on (different MAC addresses). The MAC addresses is represented as a multibyte array - BIG Endianness.
3.5.6. Version Number Encoding¶
All version numbers are encoded into a 32 bit Signed Integer [Little Endianness]:
0MMM mmmm BBBB BBBB bbbb bbbb bbbb bbbb
| Version Number Encoding | ||||
|---|---|---|---|---|
#### |
Description | Format (position) | Min | Max |
0MMM |
Major version - upper 4(3) bits of byte 3 | 0**MMM** ???? | 0x0? | 0x7? |
mmmm |
Minor version - lower 4 bits of byte 3 | ???? mmmm | 0x?0 | 0x?9 |
BBBB BBBB |
Bug fixing number | Byte 2 | 0x00 [BCD] | 0x99 [BCD] |
bbbb bbbb bbbb bbbb |
Build Number | Byte 1 and Byte 0 (unsigned SHORT) | 0x0000 [BCD] | 0x9999 [BCD] |
As an example 1.7.37.1510 is encoded as shown below: (Numbers normally presented at user-level is shown in bold)
These are encoded in the 4 bytes as:
Byte 3 (MSB): 0x17 (Presented at user-level) Byte 2: 0x37 (Presented at user-level) Byte 1: 0x15 Byte 0 (LSB): 0x10
3.5.7. LWP Version Number Encoding¶
The LWP Protocol Version is encoded in a single UInt16 as BCD.
MMMM MMMM mmmm mmmm
| LWP Version Number Encoding (LEGO Wireless Protocol) | ||||
|---|---|---|---|---|
#### #### |
Description | Format (position) | Min | Max |
MMMM MMMMM |
Major version - upper 8 bits | Byte 1 | 0x01 | 0x99 |
mmmm mmmm |
Minor version - lower 8 bits | Byte 0 | 0x00 | 0x99 |
3.6. Hub Actions¶
| Message Type - Hub Actions [0x02] | |
|---|---|
Communication: Size: Description: |
Downstream + Upstream 4 Bytes This message allows for performing control actions on the connected Hub. Some of the controlling downstream actions, will trigger upstream updates from the hub. |
3.6.1. Hub Action Message Format¶
| Hub Action Message Format | |||||
|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | |
| Common Header | See Common Message Header | N/A | N/A | N/A | |
| Action Types | Identifies the property subject to the performed operation: | Uint8 | 0x01 | 0x32 | |
3.6.2. Action Types¶
| Downstream (reserved 0-0x2F) | |
|---|---|
| Action Type | Description |
| 0x01 | Switch Off Hub |
| 0x02 | Disconnect |
| 0x03 | VCC Port Control On |
| 0x04 | VCC Port Control Off |
| 0x05 | Activate BUSY Indication (Shown byRGB. Actual RGB settings preserved). |
| 0x06 | Reset BUSY Indication (RGB shows the previously preserve RGB settings). |
| … | |
| … | |
| 0X2F | Shutdown the Hub without any up-stream information send. Used for fast power down in production. Suggested for PRODUCTION USE ONLY! |
| Upstream (reserved 0x30-0x64) | |
|---|---|
| Action Type | Description |
| 0x30 | Hub Will Switch Off |
| 0x31 | Hub Will Disconnect |
| 0x32 | Hub Will Go Into Boot Mode |
| … | |
3.7. Hub Alerts¶
| Message Type - Hub Alerts [0x03] | ||
|---|---|---|
Communication: Size: Description: |
Upstream and Downstream | |
| Upstream | 5 bytes | |
| Downstream | 6 Bytes including the “Boolean” Alert Payload | |
| This message allow for subscribing to Hub alerts as well requesting current state of these. | ||
3.7.1. Hub Alert Message Format¶
| Hub Alert Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Alert type | Identifies the property subject to the performed operation: | Uint8 | 0x01 | 0x04 |
| Alert Operation | The operation to perform on the specified property | Uint8 | 0x01 | 0x04 |
3.7.2. Alert type¶
| Hub Alert Types | |
|---|---|
| Alert Type | Description |
| 0x01 | Low Voltage |
| 0x02 | High Current |
| 0x03 | Low Signal Strength |
| 0x04 | Over Power Condition |
3.7.3. Alert Operation¶
| Hub Alert Operations | |
|---|---|
| Alert Operation | Description |
| 0x01 | Enable Updates (Downstream) |
| 0x02 | Disable Updates (Downstream) |
| 0x03 | Request Updates (Downstream) |
| 0x04 | Update (Upstream) |
3.7.4. Alert Payload¶
| Hub Alert Message Payload in upstream direction | |
|---|---|
| Alert Payload | Description |
| 0x00 | Status OK |
| 0xFF | Alert! |
3.8. Hub Attached I/O¶
| Message Type - Hub Attached I/O [0x04] | ||
|---|---|---|
| Communication: | Upstream | |
| Size: | 5 Bytes | (Detached I/O) |
| 15 Bytes | (Attached I/O) | |
| 9 Bytes | (Attached Virtual I/O) | |
| Description: | This message allow for subscribing to Hub alerts as well as requesting current state of these. REMARK: Current running implementations (primo 2018) will only send this message for Virtual Ports at the very first Attached IO message. If Virtual Port Setup [0x61] is called later the move-bases and HUBs will incorrectly send an error upstream. Should just reply with the already (implicit) set port IDs. |
|
3.8.1. Hub Attached I/O Message Format¶
| Hub Attached I/O - Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Port ID | The Port ID associated with the Attached I/O assigned by the Hub | UInt8 | 0 | Port ID |
| Event | IO de- and attachment events | UInt8 | 0x00 | 0x02 |
| Below IO Type ID only for the Attached I/O and Attached Virtual I/O | ||||
| IO Type ID | Unique type identification of the attached I/O device. | UInt16 | 0x0000 | 0xFFFF |
| Below only set if Event = Attached I/O | ||||
| Hardware Revision | The hardware revision of the I/O Four bytes: {major, minor, bugfix, buildno} See Version Number Encoding: | Int32 | N/A | N/A |
| Software Revision | The software revision of the I/O Four bytes: {major, minor, bugfix, buildno} See Version Number Encoding: | Int32 | N/A | N/A |
| Below only set if Event = Attached Virtual I/O | ||||
| Port ID A | The first Port ID forming the Virtual I/O | Uint8 | N/A | N/A |
| Port ID B | The second Port ID forming the Virtual I/O | Uint8 | N/A | N/A |
3.8.2. Port ID¶
| Port ID | |
|---|---|
| ID range | Description |
| 000 - 049 | Hub connector (0, 1, 2 .. 49)[##] |
| 050 - 100 | Internal |
| 101 - 255 | Reserved |
[##] Port IDs 0x00 - 0x0F used by HardWare Functional Mapping.
3.8.3. Event¶
| I/O Event | |
|---|---|
| Event | Description |
| 0x00 | Detached I/O |
| 0x01 | Attached I/O |
| 0x02 | Attached Virtual I/O |
3.8.4. IO Type ID¶
| IO Type IDs | |
|---|---|
| Below mentioned IDs are the ones known at release of this document. Hence these IDs are only mentioned as a user- friendly reference. List NOT guaranteed up to date! | |
| Type ID | Description |
| 0x0001 | Motor |
| 0x0002 | System Train Motor |
| 0x0005 | Button |
| 0x0008 | LED Light |
| 0x0014 | Voltage |
| 0x0015 | Current |
| 0x0016 | Piezo Tone (Sound) |
| 0x0017 | RGB Light |
| 0x0022 | External Tilt Sensor |
| 0x0023 | Motion Sensor |
| 0x0025 | Vision Sensor |
| 0x0026 | External Motor with Tacho |
| 0x0027 | Internal Motor with Tacho |
| 0x0028 | Internal Tilt |
3.9. Generic Error Messages¶
| Message Type - Error Messages [0x05] | |
|---|---|
Communication: Size: Description: |
Upstream 5 Bytes Generic Errors (also informative feedback e.g. ACK) messages. Definitions of the error types are listed at Error Codes. Errors messages includes the command ID which intro- duced the error or the ACK (message). The Overcurrent (0x07) is send when an already stalled output is issued another active output command. I.e. telling the user that the command will not be executed due to the Overcurrent of the stalled output port. The Internal ERROR should never occur - only triggered if internal functionality fails. Wrong command and/or wrong parameters are signaled as 0x05 and 0x06 |
3.9.1. Error Message Format¶
| Error Message Format | ||||
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Command type | The Command which has introduced this message. See the definitions in this document if Error is 0x05 the Message Type will of course be an invalid Message token. | UInt8 | 0x01 | 0xFF |
| Error Codes | The error introduce by the above mentioned command | UInt8 | 0x01 | 0x08 |
3.9.2. Error Codes¶
| Error codes | |
|---|---|
| Error code | Error Description |
| 0x01 | ACK |
| 0x02 | MACK |
| 0x03 | Buffer Overflow |
| 0x04 | Timeout |
| 0x05 | Command NOT recognized |
| 0x06 | Invalid use (e.g. parameter error(s) |
| 0x07 | Overcurrent |
| 0x08 | Internal ERROR |
3.10. H/W NetWork Commands¶
| Message Type - H/W Network Commands [0x08] | ||
|---|---|---|
| Communication: | Upstream and Downstream | |
| Size: | Connect Request (upstream) | 5 Bytes |
| Family Request (upstream) | 4 Bytes | |
| Family Set (downstream) | 5 Bytes | |
| Join Denied (downstream) | 4 Bytes | |
| Get Family (downstream) | 4 Bytes | |
| Family (upstream) | 5 Bytes | |
| Get SubFamily (downstream) | 4 Bytes | |
| SubFamily (upstream) | 5 bytes | |
| SubFamily Set New (downstream) | 5 bytes | |
| Get Extended Family (downstream) | 4 bytes | |
| Extended Family (upstream) | 5 bytes | |
| Extended Family Set New (downstream) | 5 bytes | |
| Reset Long Press Timing (downstream) | 4 bytes | |
| Description: | These commands are ONLY used for HardWare NetWork connectivity. I.e. Network without a Smart Device (e.g. IPad, IPhone etc.). The commands are used for setting up, routing connection commands and disconnecting devices from a H/W only network. | |
| Connection Request: [UpStream] | This message is used to route/gate a connection request from a peripheral device up to the con- trolling Central device. The user should be able to press the button on any devices in the current connected network for requesting a connection. Both the Pressed and the Release is send. | |
| Family Request: [UpStream] | When send upstream (from any device in the H/W network) this message is a request for a new Family and SubFamily, if possible. | |
| Family Set New: [DownStream] | This command is send from the controlling Central device and has the new Family added as payload. | |
| Join Denied: [DownStream] | This command is send to a peripheral trying to connect to a network where the maximum of nodes is reached (i.e. NO further connections available). | |
| Get Family: [DownStream] | Requesting the previous used Family for a specific (the addressed) device, just entered a network - NO family decided yet. | |
| Family: [UpStream] | This is the answer returned for above command (Get Family 0x06). Used by the Central Role device to decide the Family at auto connection. | |
| Get SubFamily: [DownStream] | Requesting the previous used SubFamily (Function) on a specific (addressed) device. E.g. a 2 port R/C to a 4 port hub. I.e. addressing a specific port (A+B or C+D) | |
| SubFamily: [UpStream] | This is the answer returned for above command (Get SubFamily 0x08). Used by the Central Role device to decide the SubFamily at auto connection. | |
| SubFamily Set New: [DownStream] | This command is send from the controlling Central device and has the new SubFamily added as payload. | |
| Get Extended Family: [DownStream] | Requesting the previous used Family and SubFamily for a specific (the addressed) device. The user can get both the Family and the SubFamily in one tx/rx. Further both are only using 3 bits for the addressing leaving one bit each for future use and/or escape. | |
| Extended Family: [UpStream] | This is the answer returned for above command (Get Extended Family 0x0A). | |
| Extended Family Set New: [DownStream] | The user can set both the Family and the SubFamily in one tx/rx. Further both are only using 3 bits for the addressing leaving one bit each for future use and/or escape (extended use). | |
| Reset Long Press Timing: [Down Stream] | The timing of the user CONNECTION PRESS may be stretched (timer reset) when connecting in a Bluetooth active environment. I.e. the LONG PRESS normally is used for powering down a device, but also used for gating keypresses to the Central in a connection sequence (allowing a longer connec- tion time without povering down. | |
3.10.1. H/W NetWork Message Format¶
| H/W NetWork Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| H/W NetWork Command Type | Hardware Network command token | UInt8 | 0x02 | 0x0E |
| H/W NetWork Command Type = 0x02 Connection Request [Upstream] | ||||
| Connection Request Payload | Button State:
Pressed = 0x01
Released = 0x00
|
UInt8 | 0x00 | 0x01 |
| H/W NetWork Command Type = 0x04 Family Set New [Downstream] | ||||
| New H/W NetWork Family payload | The New H/W NetWork Family from controlling Central Device | Uint8 | 0x01 | 0x08 |
| H/W NetWork Command Type = 0x07 “Family” [Upstream] | ||||
| H/W NetWork Family payload | Family 0-8 (0), encoding see H/W NetWork Family | Uint8 | 0x01 | 0x08 |
| H/W NetWork Command Type = 0x09 SubFamily [Upstream] | ||||
| H/W NetWork Sub-Family payload | SubFamily 1-7, encoding see H/W NetWork Sub-Family | Uint8 | 0x01 | 0x07 |
| H/W NetWork Command Type = 0x0A SubFamily Set New [Downstream] | ||||
| New H/W NetWork Sub-Family payload | The New H/W NetWork Sub-Family from controlling Central Device. | Uint8 | 0x01 | 0x07 |
| H/W NetWork Command Type = 0x0C Extended Family [Upstream] | ||||
| H/W NetWork Extended Family payload | Command used to get both the H/W NetWork Family 0-8 and H/W NetWork Sub-Family 1-7 in one single transmission. Encoded as shown at H/W NetWork Extended Family. | Uint8 | 0x11 | 0x78 |
| H/W NetWork Command Type = 0x0D Extended Family Set New [Downstream] | ||||
| New H/W NetWork Extended Family payload | Command used to get both the H/W NetWork Family 0-8 and H/W NetWork Sub-Family 1-7 in one single transmission. Encoded as shown at H/W NetWork Extended Family. | Uint8 | 0x11 | 0x78 |
3.10.2. H/W NetWork Command Type¶
| H/W NetWork Command Types | |
|---|---|
| Command Type: | Description |
| 0x02 | Connection Request |
| 0x03 | Family Request [New family if available] |
| 0x04 | Family Set |
| 0x05 | Join Denied |
| 0x06 | Get Family |
| 0x07 | Family |
| 0x08 | Get SubFamily |
| 0x09 | SubFamily |
| 0x0A | SubFamily Set |
| 0x0B | Get Extended Family |
| 0x0C | Extended Family |
| 0x0D | Extended Family Set |
| 0x0E | Reset Long Press Timing |
3.10.3. H/W NetWork Family¶
| H/W NetWork Families (Colours) | ||
|---|---|---|
| Family: | Colours: | #: |
| Family 1 | Green | 0x01 |
| Family 2 | Yellow | 0x02 |
| Family 3 | Red | 0x03 |
| Family 4 | Blue | 0x04 |
| Family 5 | Purple | 0x05 |
| Family 6 | Light Blue | 0x06 |
| Family 7 | Teal | 0x07 |
| Family 8 | Pink | 0x08 |
| Family 0 (zero) | White[1] | 0x00 |
[1] Optional Platform Family
3.10.4. H/W NetWork Sub-Family¶
| H/W NetWork Families (Flashes)[A] | ||
|---|---|---|
| Family: | Flashes: | #: |
| Sub-Family 1 | One Flash | 0x01 |
| Sub-Family 2 | Two Flashes | 0x02 |
| Sub-Family 3 | Three Flashes | 0x03 |
| Sub-Family 4 | Four Flashes | 0x04 |
| Sub-Family 5 | Five Flashes | 0x05 |
| Sub-Family 6 | Six Flashes | 0x06 |
| Sub-Family 7 | Seven Flashes | 0x07 |
[A] The flashes is “dark periodes” of the normal Family color. E.g. Family 1 and Sub-Family 3 is shown as Green with 3 periods of “NO light”.
3.10.5. H/W NetWork Extended Family¶
The H/W NetWork Extended Family is encoded in one single byte as:
s = SubFamily[B] f = Family[B] Bit 7 is reserved for future use
Bit 7 sss ffff
| Examples: | |
|---|---|
0 001 0001 |
Family 1, Sub-Family 1 |
0 001 0010 |
Family 2, Sub-Family 1 |
| — | — |
| — | — |
0 011 0101 |
Family 5, Sub-Family 3 |
0 111 1000 |
Family 8, Sub-Family 7 |
[B] Family 0 (zero) and Sub-Family 0 (zero) NOT used.
3.11. F/W Update - Go Into Boot Mode¶
| Message Type - Go Into Boot Mode [0x10] | |
|---|---|
Communication: Size: Description: |
Downstream 12 Bytes This is the FirmWare update message a.k.a. Go Into Boot Mode. Since this a serious command a safety check string is added. The command will trigger a message on the Hub Actions Notification (0x02). |
3.11.1. Go Into Boot Mode Message Format¶
| Go Into Boot Mode Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Safety String | Safety String[0] = ‘L’
Safety String[1] = ‘P’
Safety String[2] = ‘F’
Safety String[3] = ‘2’
Safety String[4] = ‘-‘
Safety String[5] = ‘B’
Safety String[6] = ‘o’
Safety String[7] = ‘o’
Safety String[8] = ‘t’
|
UInt8[9] | N/A | N/A |
3.12. F/W Update Lock memory¶
| Message Type - F/W Update Lock Memory [0x11] | |
|---|---|
Communication: Size: Description: |
Downstream 11 Bytes This is the safety memory lock used in the production (NOT for the enduser). The FirmWare can still be updated, but only via the application itself - NOT via a debugger tool and alike. The safety string Lock Mem should be applied. The chip resets after this command. |
3.12.1. F/W Update Lock Memory Message Format¶
| F/W Update Lock Memory Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Safety String | Safety String[0] = ‘L’
Safety String[1] = ‘o’
Safety String[2] = ‘c’
Safety String[3] = ‘k’
Safety String[4] = ‘-‘
Safety String[5] = ‘M’
Safety String[6] = ‘e’
Safety String[7] = ‘m’
|
Uint8[8] | N/A | N/A |
3.13. F/W Update Lock Status Request¶
| Message Type - F/W Update Lock Status Request [0x12] | |
|---|---|
Communication: Size: Description: |
Downstream 3 Bytes (NO payload - ONLY Header) Checking the Memory Locking state at the BOOT-loader memory area. Used in the production (NOT for the enduser). Triggers an answer on F/W Lock Status [0x13] |
3.13.1. F/W Update Lock Status Request Message Format¶
| F/W Update Lock Status Request Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
3.14. F/W Lock Status¶
| Message Type - F/W Update Lock Status [0x13] | |
|---|---|
Communication: Size: Description: |
Upstream 4 Bytes Answer to the F/W Update Lock Status Request [0x12] |
3.14.1. F/W Update Lock Status Message Format¶
| F/W Update Lock Status Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Lock Status | Actual Memory Locking Status
0x00 : Lock Status == OK
0xFF : Lock Status == NOT LOCKED
|
Uint8 | 0x00 | 0xFF |
3.15. Port Information Request¶
| Message Type - Port Information Request [0x21] | |
|---|---|
Communication: Size: Purpose: Triggers Reply |
Downstream 5 Bytes Request Port Info and Value. The reply is dependent of the Information Type. 0x00 ==> 0x45 Port Value (Standard Ports)
0x00 ==> 0x46 Port Value (Combined Mode Ports)
0x01 ==> 0x43 Port Information (Common For All Ports)
0x02 ==> 0x43 Port Information (Common For All Ports)
|
3.15.1. Port Information Request Format¶
| Port Information Request Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Port ID | The Port ID associated with the Attached I/O assigned by the Hub | Uint8 | 0x00 | Port ID |
| Information Type | Identifies the Requested Information Type. | Uint8 | 0x00 | 0x02 |
3.15.2. Information Type¶
| Information Type | |
|---|---|
| Information Type | Description |
| 0x00 | Port Value |
| 0x01 | Mode Info |
| 0x02 | Possible Mode Combinations.
Should only be used if the “Logical Combinable”-bit is set in the
(MODE INFO Capabilities byte). I.e. in the Port Information 0x43
|
3.16. Port Mode Information Request¶
| Message Type - Port Mode Information Request [0x22] | |
|---|---|
Communication: Size: Purpose: Triggers Reply |
Downstream 6 Bytes Request information about the different modes of the LPF2 Device connected to the port. Triggers a reply on Port Mode Information [0x44]. The reply is dependent of the requested Mode Information Types. |
3.16.1. Port Mode Information Request Format¶
| Port Mode Information Request Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Port ID | The Port ID associated with the Attached I/O assigned by the Hub | Uint8 | 0 | Port ID |
| Mode | The Mode to get information for | Uint8 | 0 | N/A |
| Information Type | Identifies the Mode Information Types | Uint8 | 0 | 128 |
3.16.2. Mode Information Types¶
| Mode Information Type | ||
|---|---|---|
| Mode Information No | Info Short Name | Description** |
| 0x00 | NAME | Name of the mode |
| 0x01 | RAW | The raw range |
| 0x02 | PCT | The percent range |
| 0x03 | SI | The SI value range |
| 0x04 | SYMBOL | The standard name of value |
| 0x05 | MAPPING | |
| 0x06 | Used internally | |
| 0x07 | Motor Bias (0-100%) | |
| 0x08 | Capability bits (6 bytes total) | |
| 0x80 | VALUE FORMAT | Value encoding |
3.17. Port Input Format Setup (Single)¶
| Message Type - Port Input Format Setup (Single) [0x41] | |
|---|---|
Communication: Size: Purpose: Triggers Reply: |
Downstream 10 Bytes Setup the mode of operation for the LPF2 Device connected to the addressed Port. Triggers a reply on Port Input Format [0x47]. |
3.17.1. Format of Port Input Format Setup (Single)¶
| Format of Port Input Format Setup (Single) | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Port ID | The Port ID associated with the Attached I/O assigned by the Hub | Uint8 | 0 | Port ID |
| Mode | The Mode to get information for | Uint8 | 0 | N/A |
| Delta Interval | The changes in the delta value to trigger a value update. If set to 0 (zero) data will be send as fast as possible (live data) should NOT be use due to the limited Bluetooth LE bandwidth. Remark: If a sensor is used in combined mode, the Delta Interval should be set for each of the combined modes. E.g. A sensor set to both give discrete color values (0-6) and RAW data, should NOT have the Delta Interval for the RAW data set to ‘1’. The RAW data would trigger a lot of updates and hence flood fill the BLE radio link. |
Uint32 | 0 | N/A |
| Notification Enabled | Enabling notification of value changes. If NOT enabled the input value(s) can only be read by Port Information 0x21 property 000.
|
Uint8 | 0 | 1 |
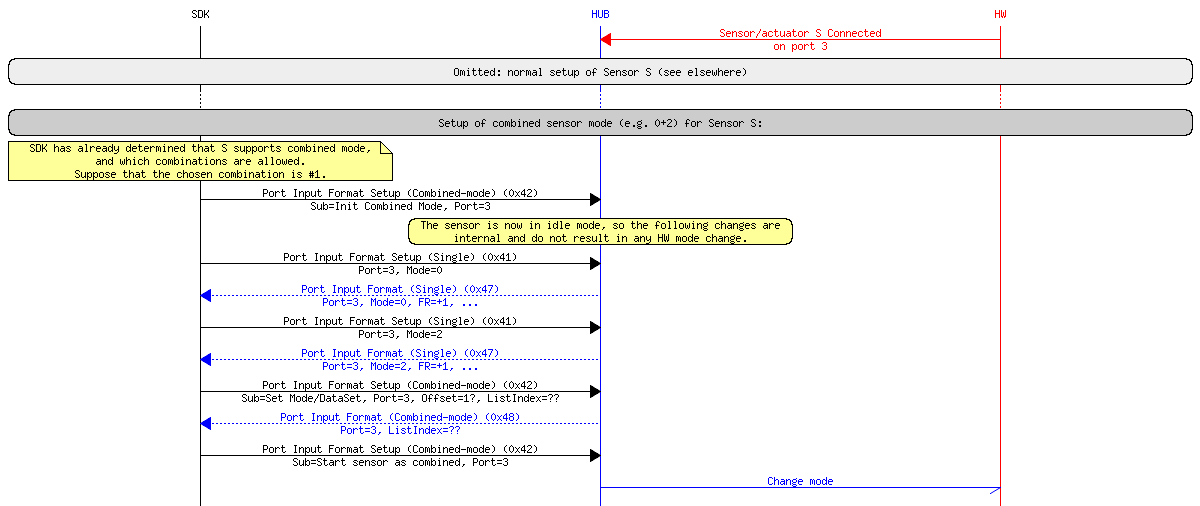
3.18. Port Input Format Setup (CombinedMode)¶
| Message Type - Port Input Format Setup (CombinedMode) [0x42] | |
|---|---|
| Communication: | Downstream |
| Size: | 7 Bytes - SubCommand 0x01
5 Bytes - All other SubCommands (I.e. != 0x01)
|
| Purpose: | This command is used to setup a sensor which can be used with more combinations of Mode and DataSets (CombinedMode). I.e. by setting a sensor in Combined Mode, the user can have data of different formats from a sensor in one and only transmission.The count of and the possible combinations are retrieved from the Port Information Request [21] with the sub command 0x02: POSSIBLE MODE COMBINATIONS. If the Combination 0 multi update is enabled, an update (delta interval reached) from the Mode/Dataset[0] will automatically contain a total update of all the Mode/Data-sets setup in the Combined Mode setup session. To setup of a Combined Sensor the user has to follow the following steps:
|
| Triggers Reply | Triggers a reply on Port Input Format [0x48]. |
3.18.1. Format of Port Input Format Setup (CombinedMode)¶
| Format of Port Input Format Setup (CombinedMode) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | ||||
| Common Header | See Common Message Header | N/A | N/A | N/A | ||||
| Port ID | The unique Port ID for this combined sensor | Uint8 | 0 | Port ID | ||||
| Sub Command | Port Input Format Setup (Sub-) Commands | Uint8 | 0 | 6 | ||||
| Sub Command = 0x01 SetModeDataSet combination(s) | ||||||||
| Combination Index | Combination index from the LPF2 device Port Information Request sub command 0x03: POSSIBLE MODE COMBINATIONS [Combination index]. The H/W will use this information to setup the right mode of operation. The Mode/Dataset combinations cannot give this information - the user can choose a subset of the possible Mode/Dataset combinations and hence a given combination is not explicit! | Uint8 | 0 | 7 | ||||
| Mode/DataSet[0] |
If the combined sensor is unlocked with the command UnlockAndStartWithMultiUpdate Enabled, the value updates of Mode/DataSet[0] will trigger a total update of all the chosen combinations of the Combined Sensor (Master update). |
Uint8 | N/A | N/A | ||||
| Mode/DataSet[1] |
|
Uint8 | N/A | N/A | ||||
| Mode/DataSet[n] |
|
Uint8 | N/A | N/A | ||||
3.18.2. Port Input Format Setup (Sub-) Commands¶
| Port Input Format Setup (Sub-) Commands | |
|---|---|
| Sub-Command: | **Description |
| 0x01 | Set ModeAndDataSet combination(s) |
| 0x02 | Lock LPF2 Device for setup |
| 0x03 | UnlockAndStartWithMultiUpdateEnabled |
| 0x04 | UnlockAndStartWithMultiUpdateDisabled |
| 0x05 | NOT USED |
| 0x06 | Reset Sensor [X] |
[X] Reset the sensor to the legacy mode 0 (zero)
3.18.3. POSSIBLE MODE COMBINATIONS¶
The possible mode combinations are stored as a one-dimensional array of maximum 8 UInt16. I.e. A list showing a maximum of 8 different combinations each of max. 16 modes.
| POSSIBLE MODE COMBINATIONS | |||
|---|---|---|---|
| Combination Index: | Modes: | Valid Combination Examples | |
| Index 0 | 0 0 0 0 0 0 0 0 0 0 0 1 0 1 1 0 | Mode 1 + Mode 2 + Mode 4 | |
| Index 1 | 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 | Mode 0 + Mode 1 | |
| Index 2 | 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1 | Mode 0 + Mode 3 | |
| Index 3 | 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 | “End-of-combinations” | |
| Index 4 | 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 | ||
| Index 5 | 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 | ||
| Index 6 | 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 | ||
| Index 7 | 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 | ||
3.19. Port Information¶
| Message Type - Port Information [0x43] | |
|---|---|
Communication: Size: Purpose: Replies: |
Upstream Information Type 0x01 : 11 Bytes
Information Type 0x02 : 7 Bytes (1 combination) up to 21 Bytes (8 combinations).
Returns the specified information about the LPF2 Device connected to the Port. Port Information Request [0x21] (Information Type: 0x01-0x02). |
3.19.1. Port Information Format¶
| Port Information Format | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | ||||||||||
| Common Header | See Common Message Header | N/A | N/A | N/A | ||||||||||
| Port ID | The Port ID associated with the Attached I/O assigned by the Hub | Uint8 | 0 | Port ID | ||||||||||
| Information type | Identifies the Information Type:
|
Uint8 | 0x01 | 0x02 | ||||||||||
| Information Type == MODE INFO (001) | ||||||||||||||
| Capabilities |
|
Uint8 | 0x00 | 0x0F | ||||||||||
| Total Mode Count | Total number of port modes | Uint8 | 0 | 255 | ||||||||||
| Input Modes | Available Input Port Modes (bitmask)
|
Uint16 | 0 | 65535 | ||||||||||
| Output Modes | Available Output Port Modes (bitmask)
|
Uint16 | 0 | 65535 | ||||||||||
| Information Type == POSSIBLE MODE COMBINATIONS (002) | ||||||||||||||
| Mode Combinations | Up to 8 times UWORD bit-fields showing the possible mode/value-sets combinations for a given sensor. Some combinations cannot be used due to the need for different H/W setup (mode affects each others, H/W switch- and settling time etc.)[Y] See also POSSIBLE MODE COMBINATIONS for more information and an example. |
Uint8 | 0 | 15 | ||||||||||
[Y] Mode combinations NOT possible are discarded by the sensor.
3.20. Port Mode Information¶
| Message Type - Port Mode Information [0x44] | |
|---|---|
Communication: Size: Purpose: Replies: |
Upstream Information Type 0x00 : 17 Bytes
Information Type 0x01 : 14 Bytes
Information Type 0x02 : 14 Bytes
Information Type 0x03 : 14 Bytes
Information Type 0x04 : 11 Bytes
Information Type 0x05 : 8 Bytes
Information Type 0x06 : -
Information Type 0x07 : 7 Bytes
Information Type 0x08 : 12 Bytes
-
Information Type 0x80 : 10 Bytes
Returns specified Mode Information Types about the LPF2 device connected to the Port. Port Mode Information [0x22] (Information Type: 0x00-0x80). |
3.20.1. Port Mode Information Format¶
| Port Mode Information Format | ||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | ||||||||||||||||||||||||||||||||||||
| Common Header | See Common Message Header | N/A | N/A | N/A | ||||||||||||||||||||||||||||||||||||
| Port ID | The Port ID associated with the Attached I/O assigned by the Hub | Uint8 | 0 | Port ID | ||||||||||||||||||||||||||||||||||||
| Mode | The mode of the Input. Possible values and interpretation depends on the specific Input Type. | Uint8 | N/A | N/A | ||||||||||||||||||||||||||||||||||||
| Mode Information Types | Identifies the Information Type | Uint8 | 0 | 0x80 | ||||||||||||||||||||||||||||||||||||
| Information Type == NAME (000) | ||||||||||||||||||||||||||||||||||||||||
| Name | The maximum length is 11 chars NOT ASCIIZ terminated - length is decoded from total packet length. ONLY ASCII chars: 0x30.. 0x39, 0x41..0x5A, 0x5F and 0x61..0x7A are allowed. | Uint8[0..10] | 1 | 11 | ||||||||||||||||||||||||||||||||||||
| Information Type == RAW (001) | ||||||||||||||||||||||||||||||||||||||||
| RAW Range | The range for the raw (transmitted) signal, remember other ranges are used for scaling the value. | RawMin, RawMax [2 * 4 bytes [FLOATING POINT]] | N/A | N/A | ||||||||||||||||||||||||||||||||||||
| Information Type == PCT (002) | ||||||||||||||||||||||||||||||||||||||||
| PCT Range | What % window should the RAW values be scaled to.
E.g.
If
RAW == 0-200
PCT == 0-100
Then
100 RAW == 50%.
|
PctMin, PctMax [2 * 4 bytes [FLOATING POINT]] | N/A | N/A | ||||||||||||||||||||||||||||||||||||
| Information Type == SI (003) | ||||||||||||||||||||||||||||||||||||||||
| SI Range | As above | SiMin, SiMax [2 * 4 bytes [FLOATING POINT]] | N/A | N/A | ||||||||||||||||||||||||||||||||||||
| Information Type == SYMBOL (004) | ||||||||||||||||||||||||||||||||||||||||
| Symbol | The standard name for a given output. E.g. DEG for degrees. Normally shortened to max. 5 chars. | Uint8[0..4] | 1 | 5 | ||||||||||||||||||||||||||||||||||||
| Information Type == MAPPING (005) | ||||||||||||||||||||||||||||||||||||||||
| Mapping |
The roles are: The host of the sensor (even a simple and dumb black box) can then decide, what to do with the sensor without any setup (default mode 0 (zero). Using the LSB first (highest priority). |
Uint16 xxxx xxxx yyyy yyyy | N/A | N/A | ||||||||||||||||||||||||||||||||||||
| Information Type == MOTOR BIAS (007) | ||||||||||||||||||||||||||||||||||||||||
| Motor Bias | Initial PWM percentage for a given motor to start running (is of course also depending of use case). 0 - 100 % | Uint8 | 0 | 100 | ||||||||||||||||||||||||||||||||||||
| Information Type == CAPABILITY BITS (008) | ||||||||||||||||||||||||||||||||||||||||
| Capability Bits | Sensor capabilities as bits. A total of 48 bits (6 bytes) can be retrieved from a sensor. For decoding see separate doc. Bytes sent as BIG endianness.
|
Uint8[6] | ||||||||||||||||||||||||||||||||||||||
| Information Type == VALUE FORMAT (128) | ||||||||||||||||||||||||||||||||||||||||
| Value Format | Returns the Value Format. No of datasets, type and number of digits. | Uint8[4] | N/A | N/A | ||||||||||||||||||||||||||||||||||||
3.21. Port Value (Single)¶
| Message Type - Port Value (Single) [0x45] | |
|---|---|
Communication: Size: Purpose: Replies: |
Upstream Only one Port Value in each message:
5 Bytes if Port Value = UInt8
6 Bytes if Port Value = UInt16
8 Bytes if Port Value = UInt32 or FLOAT
Example with more port values in a single message:
Fixed size + Port Count * (1 + value size)
E.g. 3 port values - 2 FLOATs and 1 UInt16:
Header + 2 * (1 + 4) + 1 * (1 + 2) = 16 Bytes
Updates the host with addressed LPF2 Device data. Multiple data in one transmission (from more ports), but only from one Hub, the Hub addressed in the Common header. Size of data and type are interpreted using the Port Format received in the Port Mode Information 0x44. 0x21 Port Value (Information Type: 0x00) (polled mode) Value is updated automatically using the notification if enabled. |
3.21.1. Port Value (Single) Format¶
| Port Value (Single) Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| The following repeated for each value in this transmission: | ||||
| Port ID | The unique Port ID for this sensor | Uint8 | 0 | Port ID |
| Input Value | The value of the addressed port | Depending of the port format | N/A | N/A |
3.21.2. Value Format¶
| LPF2 Value Format | ||
|---|---|---|
| Byte[0] | Number of datasets | |
| Byte[1] | Dataset type | |
| 00 | 8 bit | |
| 01 | 16 bit | |
| 10 | 32 bit | |
| 11 | FLOAT | |
| Byte[2] | Total figures | |
| Byte[3] | Decimals if any | |
3.22. Port Value (CombinedMode)¶
| Message Type - Port Value (Combined) [0x46] | |
|---|---|
Communication: Size: Purpose: Replies: |
Upstream 6 Bytes + the individual size(s) of all the values. Updates the host with values from a Combined Mode sensor. I.e. a sensor that can deliver data from different modes in one message. The updated mode/dataset combination value(s) are addressed by the use of Value bit pointer(s). There will only be updated data from inputs opened by the notification enabled command. Updates can be further controlled using the Enable Combination 0 multi update. When using a Combined mode sensor, the user can define individual Delta Interval values for all the combined sensor modes. The first mode/dataset[0] can also be used as a sort of master updater i.e. when the triggerlevel (Delta Interval) for this Mode/Dataset[0] is reached it will automatically update all the other enabled Mode/DataSets in one single message. 0x21 Port Value (Information Type: 0x00) (polled mode) Value is updated automatically using the notification if enabled. |
3.22.1. Port Value (Combined) Format¶
| Port Value (Combined) Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Port ID | The unique Port ID for this sensor | Uint8 | 0 | Port ID |
| The value pointers are used for addressing the changed value(s). Value size should be decoded using the actual format for the Mode/Dataset. | ||||
| Mode/Dataset bit pointers | Pointing to the combination of up to 16 mode/data sets. E.g. 0001 0100b means selected mode/datasets 2 and 4. Lowest pointer first (val2, val4). The value size is interpreted by the using the actual Mode/Format setting[Z] . | Uint16(binary | 0 | 0xFFFF |
| Input Value change at Mode/Dataset[bit-p] | The changed value of the LPF2-Device at PORT ID. The bit-pointer addresses the next Mode/ dataset changed. | Depends on Input Format. | N/A | N/A |
| Input Value change at Mode/Dataset[(bit-p) + n] | Changed value of the LPF2-Device at PORT ID. The bit-pointer addresses the first Mode/dataset changed. | |||
[Z] The user should resolves the data sizes of all the (Value Format) values by using the individual formatting for each mode/dataset combination. These should be initial requested through the Port Mode Information Request (0x22) and received through the Port Mode Information (0x44).
3.23. Port Input Format (Single)¶
| Message Type - Port Input Format (Single) [0x47] | |
|---|---|
Communication: Size: Purpose: Replies To: |
Upstream 10 Bytes Handshake notification of changes made to the Port Input Format. 0x41 Port Input Format Setup (Single) |
3.23.1. Format of Port Input Format (Single)¶
| Port Input Format (Single) [0x47] | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Port ID | The Port ID associated with the Attached I/O assigned by the Hub | Uint8 | 0 | Port ID |
| Mode | The mode of the addressed Input. | Uint8 | N/A | N/A |
| Delta Interval | The delta change the Input Value has to change for triggering a new value update notification. Example: a value of 1 means that any change to the value will trigger an update (a form of live data) and a value of 10 means that the value must have changed 10 steps from an earlier notification before triggering a new update i.e. jitter-filtering. | Uint32 | 0 | N/A |
| Notification ENabled | If notifications are disabled, the Input Value can only be read by sending a read request through the Input Command Characteristic
|
Uint8 | 0 | 1 |
3.24. Port Input Format (CombinedMode)¶
| Message Type - Port Input Format (CombinedMode) [0x48] | |
|---|---|
Communication: Size: Purpose: Replies To: |
Upstream 7 Bytes Port Input Format (CombinedMode) is the handshake notification for the setup of one or more bit-pointer in the 16-bit Mode/Dataset Combination Bit Pointer - i.e. bitposition- addressed Mode/DataSet(s). Remember first combination setup referenced through bit 0, second through bit1 etc. All Format settings will be reset when the input disconnects or the Port is closed. 0x42 Port Input Format Setup (CombinedMode) |
3.24.1. Format of Port Input Format (CombinedMode)¶
| Format of Port Input Format (CombinedMode) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | ||||
| Common Header | See Common Message Header | N/A | N/A | N/A | ||||
| Port ID | The Port ID for this combined sensor | Uint8 | 0 | Port ID | ||||
| Combined Control Byte | Bit combinations declared below: | Uint8 | 0 | 255 | ||||
| Used Cobination Index | Points into the table identifying the possible H/W mode combination(s) of the LPF2 Device being used for this Combined setup. Only bit 0-3 used for this. | 0x?0 | 0x?7 | |||||
| Multi Update | Bit 7 in the Combined Control Byte indicates the actual Multi Update state:
|
0x0? | 0x8? | |||||
| The Mode/Dataset combination bit pointer is used as acknowledge-handshake for the selected Mode/Dataset combinations (setup went OK). The bits in the bit-pointer follows the address/indexing used in the setup. A bit-pointer setting of 0x0000 means: Notification initiated by a Combined Sensor Mode Clear - i.e. Sub Command ID = Reset Sensor. | ||||||||
| Mode/Dataset combination bit pointer | Pointing to the combination of up to 16 mode/ data sets. Thus, a value of e.g. 0000 0000 0001 1111b indicates that the Hub has successfully configured the desired mode/data sets for the value(s) bit-addressed. In the example it means configuring values for 5 mode/datasets. | Uint16(binary | 0 | 0xFFFF | ||||
3.25. Virtual Port Setup¶
| Message Type - Virtual Port Setup [0x61] | |
|---|---|
Communication: Size: Purpose: Triggers: |
Downstream If Sub Command = 0x00: 5 Bytes
If Sub Command = 0x01: 6 Bytes
Used to control synchronization of Ports. I.e. connect or disconnect a Virtual Port. It is up to the user (or the HUB) to decide if the virtual connection make sense. E.g. a Motor and a Light output can both be controlled at the same time using e.g. the command StartPower(Power1, Power2). The Virtual Port gets a new ID while the original Ports keeps the original IDs. All Format settings will be reset when the input disconnects or the Port is closed. 0x04 Hub Attached IO (Only the Virtual Port. The individual are Port IDs kept) REMARK: Primo 2018 the running implementations of e.g. synchronized motors in move-bases and HUBs are implemented with implicit Attached IO messages. I.e. when internal (external) I/O devices can be synchronized (setup as Virtual Port) 3 Attached IO messages is automatically sent: First Port, Second Port and then the Virtual (Third Port). Current implementation will return an ERROR if this command is sent. This should be changed in upgrades of F/W, so this command just return, what already is implicit set. Will make the interface more consistent for the App developers (same reaction for all calls).Port Input Format Setup (CombinedMode) |
3.25.1. Virtual Port Setup Format¶
| Virtual Port Setup Format | ||||||||
|---|---|---|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | ||||
| Common Header | See Common Message Header | N/A | N/A | N/A | ||||
| Sub Command |
|
Uint8 | 0 | 1 | ||||
| If Sub Command == Disconnect (0) | ||||||||
| Port ID | The Virtual Port ID to disconnect | Uint8 | 0 | Port ID | ||||
| If Sub Command == Connect (1) | ||||||||
| Port ID A | The Port ID of the first synchronizable Port | Uint8 | 0 | Port ID | ||||
| Port ID B | The Port ID of the second synchronizable Port | Uint8 | 0 | Port ID | ||||
3.26. Port Output Command¶
| Message Type - Port Output Command [0x81] | |
|---|---|
Communication: Size: Purpose: |
Downstream The size should be seen as a fixed portion (Common Header, Port ID, Startup and Completion Information, Sub Command token and an variable portion of payload bytes. Output commands. In the following the commands are group in functional groups. Motor commands. Single and synchronized ones (simple or drive). Feedback from synchronized. |
3.26.1. Port Output Command Format (Common part)¶
| Common Message Format for Port Output Command 0x81 | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Port ID | The Port ID associated with the Attached I/O assigned by the Hub | Uint8 | 0 | Port ID |
| Startup and Completion Information | Startup (s) and Completion (c): ssss cccc |
Uint8 | 0 | 255 |
| Sub Command | The Sub Command to execute. See further description in the following pages | Uint8 | 0x00 | 0xFF |
| Payload | Payload size (n) depends on the sub-command. The payload is the parameters for the sub-command. | Uint8 * n | 0 | 255 |
3.26.2. Startup and Completion Information¶
| Startup and Completion Information | ||
|---|---|---|
| ssss: | cccc: | Description: |
| 0000 | xxxx | Buffer if necessary |
| 0001 | xxxx | Execute immediately |
| 0010 | xxxx | |
| — | ||
| xxxx | 0000 | No action |
| xxxx | 0001 | Command feedback (Status) |
| xxxx | 0010 | |
| xxxx | 0011 | |
| — | ||
3.27. Output Command 0x81 - Motor Sub Commands [0x01-0x3F]¶
3.27.1. Output Sub Command - StartPower(Power)¶
| StartPower (Power): Output Command 0x81 - Sub Command N/A | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||||||
| StartPower (Power) | N/A | Power [Int8]:
|
Single: Turn on/off motor unregulated. Synchronized: Turn on/off both motors
|
||||||||
3.27.2. Output Sub Command - StartPower(Power1, Power2) [0x02]¶
| StartPower (Power1, Power2): Output Command 0x81 - Sub Command 0x02 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||||||
| StartPower (Power1, Power2) | 0x02 | Power1, Power2 [Int8, Int8]:
|
Single: N/A Synchronized: Turn on/off BOTH motors unregulated.
|
||||||||
3.27.3. Output Sub Command - SetAccTime (Time, ProfileNo) [0x05]¶
| SetAccTime (Time, ProfileNo) : Output Command 0x81 - Sub Command 0x05 | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| SetAccTime (Time, ProfileNo) | 0x05 | Time [Int16]: [0..10000]ms (Upper limit - normally used with less) ProfileNo [Int8]: [0..MAX_PROFILES] The selected profile will be used in all motor based commands if the UseProfileFlag is set TRUE. The Time and Profile Number set for the profile is ignored if the UseProfile-Flag is set FALSE. |
Single/Synchronized: Sets an acceleration profile for the motor(s) The Time is the duration time for an acceleration from 0 to 100%. I.e. a Time set to 1000 ms. should give an acceleration time of 300 ms. from 40% to 70% |
3.27.4. Output Sub Command - SetDecTime (Time, ProfileNo) [0x06]¶
| SetDecTime (Time, ProfileNo) : Output Command 0x81 - Sub Command 0x06 | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| SetDecTime (Time, ProfileNo) | 0x06 | Time [Int16]: [0..10000]ms (Upper limit - normally used with less) ProfileNo [Int8]: [0..MAX_PROFILES] The selected profile will be used in all motor based commands if the UseProfileFlag is set TRUE. The Time and Profile Number set for the profile is ignored if the UseProfile-Flag is set FALSE. |
Single/Synchronized: Sets a deceleration profile for the motor(s) The Time is the duration time for an deceleration from 100% to 0. I.e. a Time set to 1000 ms. should give an deceleration time of 400 ms. from 80% down to 40% |
3.27.5. Output Sub Command - StartSpeed (Speed, MaxPower, UseProfile) [0x07]¶
| StartSpeed (Speed, MaxPower, UseProfile) : Output Command 0x81 - Sub Command 0x07 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||||||||
| StartSpeed (Speed, MaxPower, UseProfile) | 0x07 | Speed [Int8]:
If FLOAT or BRAKE should be used e.g. when a slider is set to 0 (zero) the user has to use either StartPower(0 or 127). MaxPower [Int8]: [ABS(0..100)]% UseProfile [Int8]: [0 = DO NOT USE, 1 = USE PROFILE]
|
Single/Synchronized: START or HOLD the motor(s) and keeping the SPEED/POSITION NOT using power-levels greater than MaxPower. |
||||||||||
3.27.6. Output Sub Command - StartSpeed (Speed1, Speed2, MaxPower, UseProfile) [0x08]¶
| StartSpeed (Speed1, Speed2, MaxPower, UseProfile) : Output Command 0x81 - Sub Command 0x08 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||||||||
| StartSpeed (Speed1, Speed2, MaxPower, UseProfile) | 0x08 | Speed1, Speed2 [Int8]:
If FLOAT or BRAKE should be used e.g. when a slider is set to 0 (zero) the user has to use either StartPower(0 or 127). MaxPower [Int8]: [ABS(0..100)]% UseProfile [Int8]: [0 = DO NOT USE, 1 = USE PROFILE]
|
Single: N/A Synchronized: START or HOLD the motor(s) and keeping the SPEED/POSITION NOT using power-levels greater than MaxPower. |
||||||||||
3.27.7. Output Sub Command - StartSpeedForTime (Time, Speed, MaxPower, EndState, UseProfile) [0x09]¶
| StartSpeedForTime (Time, Speed, MaxPower, EndState, UseProfile) : Output Command 0x81 - Sub Command 0x09 | |||||||
|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||
| StartSpeedForTime (Time, Speed, MaxPower, EndState, UseProfile) | 0x09 | Time [Int16]: [0..MAX_INT16]ms Speed [Int8]: [-100..100]% MaxPower [Int8]: [ABS(0..100)]% EndState[Int8]: [0 = FLOAT, 126 = HOLD, 127 = BRAKE] [0 = DO NOT USE, 1 = USE PROFILE]
|
Single/Synchronized: Start the motor(s) for Time ms. keeping a speed of Speed using a maximum power of MaxPower. After Time stopping the output using the EndState. |
||||
3.27.8. Output Sub Command - StartSpeedForTime (Time, Speed, MaxPower, EndState, UseProfile) [0x0A]¶
| StartSpeed (Time, SpeedL, SpeedR, MaxPower, EndState, UseProfile) : Output Command 0x81 - Sub Command 0x0A | |||||||
|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||
| StartSpeedForTime(Time, SpeedL, SpeedR, MaxPower, EndState, UseProfile) | 0x0A | Time [Int16]: [0.. MAX_INT16]ms SpeedL, SpeedR [Int8]: [-100..100]% MaxPower [Int8]: [ABS(0..100)]% EndState[Int8]: [0 = FLOAT, 126 = HOLD, 127 = BRAKE] [0 = DO NOT USE, 1 = USE PROFILE]
|
Single: N/A Synchronized: Start the motors for Time ms. And try to keep individual speeds using Speed(X) while using a maximum power of MaxPower. After Time stopping the outputs using the EndState. |
||||
3.27.9. Output Sub Command - StartSpeedForDegrees(Degrees, Speed, MaxPower, EndState, UseProfile) [0x0B]¶
| StartSpeedForDegrees(Degrees, Speed, MaxPower, EndState, UseProfile) : Output Command 0x81 - Sub Command 0x0B | |||||||
|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||
| StartSpeedForDegrees(Degrees, Speed, MaxPower, EndState, UseProfile) | 0x0B | Degrees [Int32]: [1..MAX_INT32] Speed [Int8]: [-100..100]% MaxPower [Int8]: [ABS(0..100)]% EndState[Int8]: [0 = FLOAT, 126 = HOLD, 127 = BRAKE] [0 = DO NOT USE, 1 = USE PROFILE]
|
Single/Synchronized: Start the motor(s) for Degrees at a speed of Speed using a maximum power of MaxPower. After Degrees stopping the output using the EndState. Direction controlled solely by the sign of the Speed param. |
||||
3.27.10. Output Sub Command - StartSpeedForDegrees(Degrees, SpeedL, SpeedR, MaxPower, EndState, UseProfile) [0x0C]¶
| StartSpeedForDegrees(Degrees, SpeedL, SpeedR, MaxPower, EndState, UseProfile) : Output Command 0x81 - Sub Command 0x0C | |||||||
|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||
| StartSpeedForDegrees(Degrees, SpeedL, SpeedR, MaxPower, EndState, UseProfile) | 0x0C | Degrees [Int32]: [0..10000000] (NO signed value - See Tacho Math) SpeedL, SpeedR [Int8]: [-100..100]% MaxPower [Int8]: [ABS(0..100)]% EndState[Int8]: [0 = FLOAT, 126 = HOLD, 127 = BRAKE] [0 = DO NOT USE, 1 = USE PROFILE]
|
Single: N/A Synchronized: Start the motors for Degrees and try to keep individual speeds using Speed(X) while using a maximum power of MaxPower. After Degrees is reached stop the outputs using the EndState. |
||||
3.27.11. Output Sub Command - GotoAbsolutePosition(AbsPos, Speed, MaxPower, EndState, UseProfile) [0x0D]¶
| GotoAbsolutePosition(AbsPos, Speed, MaxPower, EndState, UseProfile) : Output Command 0x81 - Sub Command 0x0D | |||||||
|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||
| GotoAbsolutePosition(AbsPos, Speed, MaxPower, EndState, UseProfile) | 0x0D | AbsPos [Int32]: [MIN_INT32..MAX_INT32] Speed [Int8]: [1..100]% MaxPower [Int8]: [ABS(0..100)]% EndState[Int8]: [0 = FLOAT, 126 = HOLD, 127 = BRAKE] [0 = DO NOT USE, 1 = USE PROFILE]
|
Single: Start the motor with a speed of Speed using a maximum power of MaxPower and GOTO the Absolute position AbsPos. After position is reached the motor is stopped using the EndState mode of operation. Synchronized: As above - but using the Virtual Port as destination for the command. |
||||
3.27.12. Output Sub Command - GotoAbsolutePosition(AbsPos1, AbsPos2, Speed, MaxPower, EndState, UseProfile) [0x0E]¶
| GotoAbsolutePosition(AbsPos1, AbsPos2, Speed, MaxPower, EndState, UseProfile) : Output Command 0x81 - Sub Command 0x0E | |||||||
|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||
| GotoAbsolutePosition(AbsPos1, AbsPos2, Speed, MaxPower, EndState, UseProfile) | 0x0E | AbsPos1, AbsPos2 [Int32]: [MIN_INT32..MAX_INT32] Speed [Int8]: [1..100]% MaxPower [Int8]: [ABS(0..100)]% EndState[Int8]: [0 = FLOAT, 126 = HOLD, 127 = BRAKE] [0 = DO NOT USE, 1 = USE PROFILE]
|
Single: N/A Synchronized: Start the motors with individual speeds calculated from the common given Speed using a powerlevel limited to the MaxPower value. And the GOTO the Absolute positions: AbsPos1 and AbsPos2. E.g. If the distance to the AbsPosx of one of the motors is 1/3 of the other - the power used also has to be less. |
||||
3.27.13. Output Sub Command - PresetEncoder(Position) N/A¶
| PresetEncoder(Position) : Output Command 0x81 - Sub Command N/A | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| PresetEncoder(Position) | N/A | Position [Int32]: [MIN_INT32..MAX_INT32] As a new command (NOT QUEUED) will stop an executing command, the PresetEncoder() will automatically STOP the Motor(s). |
Single: Preset the encoder of the motor to Position. A 0 (zero) value equals RESET. Synchronized: Presets all the encoders: the virtual encoder and both the individual encoders. They are all set to POSITION. A value of 0 (zero) equals RESET.
|
3.27.14. Output Sub Command - PresetEncoder(LeftPosition, RightPosition) [0x14]¶
| PresetEncoder(LeftPosition, RightPosition) : Output Command 0x81 - Sub Command 0x14 | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| PresetEncoder(LeftPosition, RightPosition) | 0x14 | LeftPosition, RightPosition [Int32]: [MIN_INT32..MAX_INT32] As a new command (NOT QUEUED) will stop an executing command, the PresetEncoder() will automatically STOP the Motor(s). |
Single: N/A Synchronized: Presets ONLY the individual encoders of the synchronized motors to (L/R) Position. The synchronized virtual encoder is NOT affected! A value of 0 (zero) equals RESET. |
3.27.15. Output Sub Command - TiltImpactPreset(PresetValue) N/A¶
| TiltImpactPreset(PresetValue) : Output Command 0x81 - Sub Command N/A | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| TiltImpactPreset(PresetValue) | N/A | PresetValue: [Int32] PresetValue [0..MAX_INT32] |
(P)Resets the Mode 3 ImpactCounts.
|
3.27.16. Output Sub Command - TiltConfigOrientation(Orientation) N/A¶
| TiltConfigOrientation(Orientation) : Output Command 0x81 - Sub Command N/A | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||||||||||||
| TiltConfigOrientation(Orientation) | N/A | Orientation: [Int8] Orientation [0-6]:
|
Set the default bottom side (orientation) mode 5.
If 6 “Use actual as Bottom reference” is issued, then all other orientations are relative to this. |
||||||||||||||
3.27.17. Output Sub Command - TiltConfigImpact(ImpactThreshold, BumpHoldoff) N/A¶
| TiltConfigImpact(ImpactThreshold, BumpHoldoff) : Output Command 0x81 - Sub Command N/A | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| TiltConfigImpact(ImpactThreshold, BumpHoldoff) | N/A | ImpactThreshold: [Int8] ImpactThreshold [0-127] BumpHoldoff: [Int8] [1..127] 10th of ms |
Sets the Impact size for a BUMP - mode 6. Sets the minimum Holdoff time between individual impacts (Bumps). The HoldOff can be set between 10 ms. and 1.27 second.
|
3.27.18. Output Sub Command - TiltFactoryCalibration(Orientation, PassCode) N/A¶
| TiltFactoryCalibration(Orientation, PassCode) : Output Command 0x81 - Sub Command N/A | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||||||
| TiltFactoryCalibration(Orientation, PassCode) | N/A | Orientation: [Int8]
PassCode = Calib-Sensor |
Tells the orientation set physically by the montage automat - Mode 7.
|
||||||||
3.27.19. Output Sub Command - HARDWARE RESET GenericZeroSetHardware() N/A¶
| HARDWARE RESET : Output Command 0x81 - Sub Command N/A | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| GenericZeroSetHardware() | N/A | Resets or zerosets the H/W component attached to the Port ID | Transmits the universal H/W Reset 0x11 token to
the addressed H/W.
Encoded through WriteDirect |
3.27.20. Output Sub Command - SetRgbColorNo(ColorNo) N/A¶
| SetRgbColorNo(ColorNo) : Output Command 0x81 - Sub Command N/A | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| SetRgbColorNo(ColorNo) | N/A | ColorNo: [Int8] [0..10] | Show the Color specified by ColorNo.
|
3.27.21. Output Sub Command - SetRgbColorNo(RedColor, GreenColor, BlueColor) N/A¶
| SetRgbColorNo(RedColor, GreenColor, BlueColor) : Output Command 0x81 - Sub Command N/A | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| SetRgbColors(RedColor, GreenColor, BlueColor) | N/A | RedColor, GreenColor, BlueColor: [UInt8] [0..255, 0..255, 0..255] | Show a color mixed off the individual RGB values.
|
3.28. WriteDirect¶
3.28.1. Output Sub Command - WriteDirect(Byte[0],Byte[0 + n]) Sub Command [0x50]¶
| WriteDirect(Byte[0],Byte[0 + n]) : Output Command 0x81 - Sub Command 0x50 | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| WriteDirect(Byte[0],Byte[0 + n]) | 0x50 | Byte(x): [Uint8] [0..255] The user has to add some decorations: PayLoad[0], PayLoad[1], CheckSum See Checksum Calculation: |
Direct byte values written directly via the H/W-wired to the LPF2 Device at I/O at Port ID. |
3.29. WriteDirectModeData¶
3.29.1. Output Sub Command - WriteDirectModeData() Sub Command [0x5]¶
| WriteDirectModeData((Mode, PayLoad[0] PayLoad [0 + n]) : Output Command 0x81 - Sub Command 0x51 | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| WriteDirectModeData(Mode, PayLoad[0] PayLoad [0 + n] | 0x51 | Mode: [Uint8] [0..MaxMode] Sets the mode. PayLoad[x]: [Uint8] [0..255] Payload transferred directly to the io-module and used in the previous setup mode. Commands encoded using this encoding are show in the Appendix: Encoding of WriteDirectModeData [0x81, 0x51] |
Write Direct data to a specific mode. I.e. the command will select/ change mode and uses the following payload as para-meters for this new mode. |
3.30. Checksum Calculation¶
The Checksum is calculated as:
ChkSum = PayLoad[0] ^ … PayLoad[n] ^ 0xFF
3.31. Tacho Math¶
The Syncronized movement is the average of the two tachocounters with the signed ratio given from the SpeedL and SpeedR. The degrees count limited to 10000000 due to max resolution without internal mathematically overflow.
As an example:
Example A:
- Run for 88 Degrees
- Left Speed (SpeedL) set to 75
- Left Speed (SpeedR) set to 35
The individual tachocounters should travel:
TachoL = ((88 * 2) * 75 * sign(SpeedL)) / (75 + 35) = 120
TachoR = ((88 * 2) * 35 * sign(SpeedR)) / (75 + 35) = 56
Example B:
- Run for 160 Degrees
- Left Speed (SpeedL) set to 55
- Right Speed (SpeedR) set to -48
The individual tachocounters should travel:
TachoL = ((160 * 2) * 55 * sign(SpeedL)) / (55 + |-48|) = 171
TachoR = ((160 * 2) * |-48| * sign(SpeedR)) / (55 + |-48|) = -149
3.32. Port Output Command Feedback¶
| Message Type - Port Output Command Feedback [0x82] | |
|---|---|
Communication: Size: Purpose: Replies To |
Upstream Normally with feedback from 1 (one) port the message size is 5 Bytes. If feedback from more ports, the message size is increased 2 bytes for each additional port. Allows users to keep track of one or more buffering 1-bytes queue and the progress of requested Port Output Command(s) (0x81). Immediate commands discarding the executing and/or the buffered command(s) are also flagged. 0x81 Port Output Command progress and buffering status |
3.32.1. Port Output Command Feedback Format¶
| Port Output Command Feedback Message Format [0x81] | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | ||||||||||
| Common Header | See Common Message Header | N/A | N/A | N/A | ||||||||||
| Port ID | The Port ID for the feedback message | UInt8 | 0 | 255 | ||||||||||
| Port FeedBack Message | FeedBack Message (as BIT-fields)
See the Buffering State Machine for further explanation of the Buffering for both the HUB- and SDK side. Also have a look at the Transmission Flow Control (Preliminary PROPOSAL!). |
UInt8 | 0 | 0x1F | ||||||||||
| 2nd Port ID | Optional 2nd PortID for the feedback message | UInt8 | 0 | 255 | ||||||||||
| Port 2 FeedBack Message | FeedBack Message (as BIT-fields) See above for bit encoding | UInt8 | 0 | 0x1F | ||||||||||
| 3rd Port ID | Optional 3rd PortID for the feedback message | UInt8 | 0 | 255 | ||||||||||
| Port 3 FeedBack Message | FeedBack Message (as BIT-fields) See above for bit encoding | UInt8 | 0 | 0x1F | ||||||||||
4. Buffering State Machine¶
Each port can have a command in progress and also a buffered command.
Per port, the state machine for this is as follows:
- There are three states:
- Nothing in progress, buffer empty. (“Idle”)
- Command in progress, buffer empty (“Busy/Empty”)
- Command in progress, buffer full (“Busy/Full”)
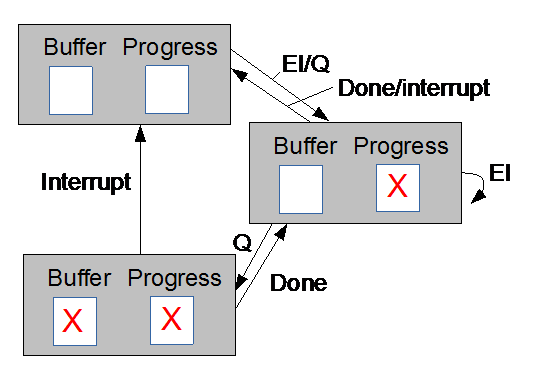
- There are external events which affect the state machine:
- A command is submitted for immediate execution (“EI”)
- A command is submitted for execution or buffering - “buffer if necessary” (“Q”)
- The current command completes (“Done”)
- An internal FW event occurs which interrupts all pending commands (internal interrupt, “Interrupt”) (Example of this: a virtual motor is interrupted by use of one of its component motors, or vice versa.)
- The state machine emits signals in the form of “Port Output Command Feedback” messages to the SDK. (The content of this command could be targetted towards tracking the fates of individual commands, or tracking the buffer state as a whole. We have chosen in the following to go with the latter option.)
Relevant info is:
- What the new state is
- Whether the state was reached because all existing commands were discarded.
- Whether any command was completed successfully (only strictly necessary if we have instantaneous commands; see below).
4.1. State machine specification¶
| Old state | Event | –> | New state | Signal out |
|---|---|---|---|---|
| Idle | Command for EI | –> | Busy/Empty | Busy/Empty |
| (–> [&]_) | (Idle) | (Idle + completed) | ||
| Command for Q | –> | Busy/Empty | Busy/Empty | |
| (–> [&]_) | (Idle) | (Idle + completed) | ||
| Done | –> | N/A | N/A | |
| Interrupy | –> | N/A | N/A | |
| Busy/Empty | Command for EI | –> | Busy/Empty | Busy/Empty + discarded |
| (–> [&]_) | (Idle) | (Idle + discarded + completed) | ||
| Command for Q | –> | Busy/Full | Busy/Full | |
| Done | –> | Idle | Idle + comleted | |
| Interrupy | –> | Idle | Idle + discarded | |
| Busy/Full | Command for EI | –> | Busy/Empty | Busy/Empty + discarded |
| (–> [&]_) | (Idle) | (Idle + discarded + completed) | ||
| Command for Q | N/A | N/A [&]_ | ||
| Done | (–> [&]_) | Busy/Empty | Busy/Empty + completed | |
| –> | (Idle) | (Idle + completed) | ||
| Interrupy | –> | Idle | Idle + discarded |
The rows marked with parentheses is for if we decide to have “instantaneous” commands; there may be FW implementation reasons for doing this. TBD
4.2. SDK-side state machine¶
Given that the FW-side state machine behaves as described above (and that all output commands for a given port are sent with the “feedback desired” bit set), a corresponding SDK-side state machine can be constructed for tracking the buffer state and the fates of all sent commands:
| Old state | Feedback event | –> | New state | Conclusions |
|---|---|---|---|---|
| Idle | Idle + completed | (–>) | Idle | 1 command completed |
| Busy/Empty | –> | Busy/Empty | (no change) | |
| Busy/Empty | Idle + completed | –> | Idle | 1 command completed |
| Idle + discarded | –> | Idle | 1 command discarded | |
| Idle + discarded + completed | (–>) | Idle | 1 command discarded; to-buffer command completed | |
| Busy/Empty + discarded | –> | Busy/Empty | 1 command discarded | |
| Busy/Full | Idle + completed | (–>) | Idle | 2 commands completed |
| Idle + discarded | –> | Idle | 2 commands discarded | |
| Idle + discarded + completed | –> | Idle | 2 commands discarded; to-buffer command completed | |
| Busy/Empty + completed | –> | Busy/Empty | 1 command discarded | |
| Busy/Empty + discarded | –> | Busy/Empty | 2 commands discarded |
5. LEGO Bluetooth Hub Boot Loader Service¶
5.1. LEGO Hub Boot Loader Service¶
The LEGO Bluetooth 3.X Hub Boot Loader Service contains the following service:
| Service | UUID |
|---|---|
| LEGO Hub Boot Loader Service | 00001625-1212-EFDE-1623-785FEABCD123 |
5.1.1. LEGO Hub Boot Loader Characteristic¶
Due to potential future limitations in future BLE chipsets, the LEGO Bluetooth 3.X Hub Boot Loader Service only contains one single characteristic:
| Characteristic | UUID |
|---|---|
| LEGO Hub Boot Loader Characteristic | 00001626-1212-EFDE-1623-785FEABCD123 |
| The <1626> LEGO Hub Boot Loader Characteristic Supported Properties | |
|---|---|
| Name | Description |
| Write with (without??) response | Allows the user app to update the functional F/W of the HUB - NOT the Radio Stack F/W. |
| Notify | Allows the server to use the Handle Value Notification ATT operation on this characteristic. |
5.1.2. The LEGO Hub Boot Loader Advertising Packet¶
| Manufacturer Data in the Boot Loader Advertising packet | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Length | Length of data | Unit8 | 0x09 | 0x09 |
| Data Type | Manufacturer specific data to follow (0xFF) | Uint8 | 0xFF | 0xFF |
| Manufacturer ID | Manufacturer identifier (LEGO System A/S = 0x0397) | Uint16 | 0x0397 | 0x0397 |
| Flash Loader Version | The Loader version is encoded as Version Number Encoding. | Sint32 | 0 | SINT32_MAX |
| System Type and Device Number | Identifies the system type of the Hub | Uint8 | 0x00 | 0xFF |
| Hub Kind | Identifies the kind of Hub - see Device Capabilities (Hub Kind) for more information. | Uint8 | 0x01 | 0xFF |
5.2. Flash Loader Functions [0x01]¶
| Message Type - Flash Loader Functions [0x01] | ||||
|---|---|---|---|---|
| Communication: | Downstream + Upstream. Upstream uses notifications. Notifications on as DEFAULT. | |||
| Size: | Sub Command | Cmd Token | Downstream | Upstream |
| Erase Flash | 0x11 | 1 | 2 | |
| Program Flash | 0x22 | 5 + bytes to program | ||
| Start APP | 0x33 | 4 | N/A | |
| Initiate Loader | 0x44 | 8 | 5 | |
| Get Info | 0x55 | 4 | 17 | |
| Get Checksum | 0x66 | 4 | 5 | |
| Get FLASH State | 0x77 | 4 | 5 | |
| Disconnect Device | 0x88 | 4 | ||
| Description: | Erase Flash | The Flash Loader normally should start erase the FLASH. This command needs NO further parameters - the H/W size etc. are known by the Flash Loader F/W. | ||
| Program Flash | Programs n-bytes [Uint8] at address 0xaaaa aaaa [Uint32]. | |||
| Start APP | As it says :-) | |||
| Initiate Loader | Telling the Flash Loader F/W, how many bytes in image. Implicite the command also clears the CheckSum. | |||
| Get Info | By using Get Info, the user can decide Total Length of Flash, Flash Loader F/W version and the H/W Reference ID. | |||
| Get Checksum | Returns the CheckSum - also on the fly. | |||
| Get FLASH State | Get the Protection Level of the FLASH. | |||
| Disconnect Device | Command used for disconnection the device. When disconnected, the device starts advertising. If NO (re-)connection done before end of the advertising period, the device will shut down. | |||
5.2.1. Flash Loader Functions Message Format¶
| Flash Loader Functions Message Format | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | Description | Format | Min | Max | ||||||||||||||||
| Sub Commands |
|
UInt8 | 0x11 | 0x88 | ||||||||||||||||
| Return type and size If Sub Command == 0x11 “Erase Flash” | ||||||||||||||||||||
| Return value |
|
UInt8 | 0x00 | 0xFF | ||||||||||||||||
| Return type and size If Sub Command == 0x22 “Program Flash” | ||||||||||||||||||||
| Returned values | CheckSum: ByteCounts: |
Uint8 Uint32 |
N/A 0x01 |
N/A N/A |
||||||||||||||||
| Return type and size If Sub Command == 0x33 “Start App” | ||||||||||||||||||||
| Return value | NO RETURN VALUE - booting | |||||||||||||||||||
| Return type and size If Sub Command == 0x44 “Initiate Loader” | ||||||||||||||||||||
| Return value |
Checksum implicit reset. |
Uint8 | 0x00 | 0xFF | ||||||||||||||||
| Return type and size If Sub Command == 0x55 “Get Info” | ||||||||||||||||||||
| Return value | Flash Loader Version: Version Number Encoding | SInt32 | N/A | N/A | ||||||||||||||||
| Flash Start Address (LSB): | UInt32 | N/A | N/A | |||||||||||||||||
| Flash End Address (MSB): | UInt32 | N/A | N/A | |||||||||||||||||
| The System Type ID for this H/W: | UInt8 | N/A | N/A | |||||||||||||||||
| Return type and size If Sub Command == 0x66 “Get CheckSum” | ||||||||||||||||||||
| Return value | Checksum: |
UInt8 | N/A | N/A | ||||||||||||||||
| Return type and size If Sub Command == 0x77 “Get FLASH State” | ||||||||||||||||||||
| Return value | FLASH State Protection Level:
|
Uint8 | N/A | N/A | ||||||||||||||||
5.3. Flash Loader Error Messages [0x05]¶
| Message Type - Flash Loader Error Messages [0x05] | |
|---|---|
| Communication: | Upstream. |
| Size: | 5 Bytes |
| Description: | Generic Flash Loader Error message. Error type and number - see below. Errors includes the command ID which introduces the error. |
5.3.1. Flash Loader Error Message Format¶
| Flash Loader Error Message Format | ||||
|---|---|---|---|---|
| Name | Description | Format | Min | Max |
| Common Header | See Common Message Header | N/A | N/A | N/A |
| Message Type | Command (Message Type) see the definitions in this document. | Uint8 | 0x01 | 0xFF |
| Error Type | 0x05 = Command NOT recognized (The ONLY Error type implemented in FLASH Loader) | Uint8 | 0x05 | 0x05 |
6. Appendix¶
6.1. Encoding of WriteDirectModeData [0x81, 0x51]¶
Commands needed for a certain mode setup are encoded using the Output Command 0x81 Sub Command 0x51 “WriteDirectModeData”.
These commands are shown and encoded as shown in the example below:
| Output Command 0x81 - TILT Sub Command | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sub Command | Value | Parameter Description | Description | ||||||||||||||
| TiltImpactPreset(PresetValue) | N/A | PresetValue: [Int32] PresetValue [0..MAX_INT32] | (P)Resets the Mode 3 ImpactCounts. Encoded through WriteDirectModeData |
||||||||||||||
| TiltConfigOrientation(Orientation) | N/A | Orientation: [Int8] Orientation [0-6]
|
Set the default bottom side (orientation) - mode 5. Encoded through WriteDirectModeData |
||||||||||||||
| TiltConfigImpact(ImpactThreshold , BumpHoldoff) | N/A | ImpactThreshold: [Int8] ImpactThreshold [0-127] BumpHoldoff: [Int8] 1..127] 10th of ms |
Sets the Impact size for a BUMP - mode 6. Sets the minimum Holdoff time between individual impacts (Bumps). The HoldOff can be set between 10 ms. and 1.27 Sec. Encoded through WriteDirectModeData |
||||||||||||||
The prolog part of the command decoration is:
- Common Header (See description at Common Message Header).
- Startup and Completion information (See description at Startup and Completion Information)
- WriteDirectModeData (0x51)
- Mode
- The rest of the message is the Mode specific payload.
E.g.
Set RGB LED into RGB mode (0x01) and set the R = 0x30, G = 0x47, B = 0x55:
Port ID, Startup and Completion Information , 0x51, 0x01, 0x30, 0x47, 0x55
| (P)RESET ENCODER Command encoded as WriteDirectModeData (Cmd 0x81, Sub Cmd 0x51) | ||
|---|---|---|
| WriteModeData Commands | Encoding | Description |
PresetEncoder(Value) Mode 2 |
Port ID, Startup and Completion Information, 0x51, 0x02, val0, val1, val2, val3 REMEMBER: val0-val3 parts of int 32 |
Write direct to Position property in sensor. I.e. a value of 0 (zero) equals reset. |
| MOTOR/OUTPUT Commands encoded as WriteDirectModeData (Cmd 0x81, Sub Cmd 0x51) | ||
|---|---|---|
| WriteModeData Commands | Encoding | Description |
StartPower (Power) Mode 0 |
Port ID, Startup and Completion Information, 0x51, 0x00, Power | Set port into adjustable PWM output using the param Power. No Speed regulation applied. |
| RGB Commands encoded as WriteDirectModeData (Cmd 0x81, Sub Cmd 0x51) | ||
|---|---|---|
| WriteModeData Commands | Encoding | Description |
SetRgbColorNo(ColorNo) Mode 0 |
Port ID, Startup and Completion Information, 0x51, 0x00, ColorNo | Set the RGB LED to ColorNo or presets the ColorNo for later mode (0x00). |
SetRgbColors(RedColor, GreenColor, BlueColor) Mode 0 |
Port ID, Startup and Completion Information, 0x51, 0x00, 0x51, 0x01, R, G, B | Set the RGB LED to Colors for instant Colors (if RGB already in mode 1) [M] . |
[M] Remark! Some sensors can be preset in a mode different from the actual used but this behavior depends of the sensors, the modes and the internal properties. E.g. the RGB uses RGB settings in mode 1, but also uses the internal properties in making the numbered colors in mode 0. If e.g. a RGB sensor is in mode 0 and color 5 show, and a WriteDirectModeData is used to set RGB values to 00,33,00 (direct to mode 1). Then a later switching to mode 1 will NOT set the 00,33,00, but show a turned off RGB. Remember the internal properties is used in both modes. Some sensor can be preset/reset in mode different from actual, but the user has to check the information and behavior for the specific sensor.
| TILT Commands encoded as WriteDirectModeData (Cmd 0x81, Sub Cmd 0x51) | ||||||||
|---|---|---|---|---|---|---|---|---|
| WriteModeData Commands | Encoding | Description | ||||||
TiltImpactPreset(PresetValue) Mode 3 |
Port ID, Startup and Completion Information, 0x51, 0x03, PresetValue | Set the Tilt into TiltImpactCount mode (0x03) and change (preset) the value to PresetValue. | ||||||
SetRgbColors(RedColor, GreenColor, BlueColor) Mode 5 |
Port ID, Startup and Completion Information, 0x51, 0x05, Orientation | Set the Tilt into TiltOrientation mode (0x05) and set the Orientation value to Orientation | ||||||
TiltConfigImpact(ImpactThreshold, BumpHoldOff) Mode 6 |
Port ID, Startup and Completion Information, 0x51, 0x06, ImpactThreshold, BumpHoldoff | Setup Tilt ImpactThreshold and BumpHoldoff by entering mode 6 and use the payload ImpactThreshold and BumpHoldoff. | ||||||
TiltFactoryCalibration(Orientation, CalibrationPassCode) Mode 7 |
Port ID, Startup and Completion Information, 0x51, 0x07, Orientation, ‘C’, ‘a’, ‘l’, ‘i’, ‘b’, ‘-‘, ‘S’, ‘e’, ‘n’, ‘s’, ‘o’, ‘r’, | Sets the actual orientation in the montage automat.
|
||||||
6.2. Encoding of WriteDirect [0x81, 0x50]¶
To gain direct access to H/W components the user can use the WriteDirect Command. The command is a sort of feed through. So for sending communication out to a LPF2 wired device, the user has to add some decoration (CheckSum etc.) to the command packet.
These commands are shown and marked in the main document as shown in the example below:
| Output Command 0x81 - HARDWARE RESET Sub Command | |||
|---|---|---|---|
| Sub Command | Value | Parameter Description | Description |
| GenericZeroSetHardware() | N/A | Resets or zerosets the H/W component attached to the Port ID | Transmits the universal 0x11 token to the addressed H/W.
|
6.2.1. Encoding of the prolog part of the command decoration is:¶
- Common Header (See Common Message Header).
- Startup and Completion information (See description at Startup and Completion Information)
- WriteDirect (0x50)
- The rest of the message is the Command specific payload.
- Checksum - See Checksum Calculation
| GENERIC RESET/ZEROSET Command encoded as DirectWrite (Cmd 0x81, Sub Cmd 0x50) | ||
|---|---|---|
| WriteDirect Commands | Encoding | Description |
| GenericZeroSetHardware() | Port ID, Startup and Completion information, 0x50, 0xD4, 0x11, 0x3A | Send a Reset/zeroset to the device connected to the port specified by the Port ID |
6.2.2. Write Direct Example - Zeroset the “sensor” attached to [Port ID]:¶
Zeroset the “sensor” attached to [Port ID]
Port ID, Startup and Completion information, 0x50, 0xD4, RESET, 0x3A
| TiltFactoryCalibration Encoded through DirectWrite (Cmd 0x81, Sub Cmd 0x50) | ||
|---|---|---|
| WriteDirect Commands | Encoding | Description |
| TiltFactoryCalibration(Orientation, PassCode) | 0x3A, Startup and Completion information, 0x50, 0xD4, Orientation, “PassCode”, CheckSum | Send calibration command to the Tilt Sensor device connected at the port specified by the Port ID |
6.2.3. Write Direct Example - Calibrate Sensor attached to [Port ID]:¶
Calibrate sensor attached to [Port ID]
PassCode = “Calib-Sensor” Orientation: = Z (2)
0x3A, Startup and Completion information, 0x50, 0xD4, 0x02, 0x43, 0x61, 0x6C, 0x69, 0x62, 0x2D, 0x53, 0x65, 0x6E, 0x73, 0x6F, 0x72, 0x77